#include <vhacdICHull.h>
|
| static const double | sc_eps = 1.0e-15 |
| |
|
| static const int32_t | sc_dummyIndex = std::numeric_limits<int32_t>::max() |
| |
◆ ICHull() [1/2]
| tesseract_collision::VHACD::ICHull::ICHull |
( |
| ) |
|
◆ ~ICHull()
| tesseract_collision::VHACD::ICHull::~ICHull |
( |
void |
| ) |
|
|
inline |
◆ ICHull() [2/2]
| tesseract_collision::VHACD::ICHull::ICHull |
( |
const ICHull & |
rhs | ) |
|
|
private |
◆ AddPoint() [1/2]
| bool tesseract_collision::VHACD::ICHull::AddPoint |
( |
const Vec3< double > & |
point | ) |
|
|
inline |
Add one point to the convex-hull.
◆ AddPoint() [2/2]
| bool tesseract_collision::VHACD::ICHull::AddPoint |
( |
const Vec3< double > & |
point, |
|
|
int32_t |
id |
|
) |
| |
Add one point to the convex-hull.
◆ AddPoints()
| bool tesseract_collision::VHACD::ICHull::AddPoints |
( |
const Vec3< double > * |
points, |
|
|
size_t |
nPoints |
|
) |
| |
Add points to the convex-hull.
◆ CleanEdges()
| bool tesseract_collision::VHACD::ICHull::CleanEdges |
( |
| ) |
|
|
private |
◆ CleanTriangles()
| bool tesseract_collision::VHACD::ICHull::CleanTriangles |
( |
| ) |
|
|
private |
◆ CleanUp()
| bool tesseract_collision::VHACD::ICHull::CleanUp |
( |
uint32_t & |
addedPoints | ) |
|
|
private |
◆ CleanVertices()
| bool tesseract_collision::VHACD::ICHull::CleanVertices |
( |
uint32_t & |
addedPoints | ) |
|
|
private |
◆ Clear()
| void tesseract_collision::VHACD::ICHull::Clear |
( |
| ) |
|
|
private |
◆ ComputePointVolume()
| bool tesseract_collision::VHACD::ICHull::ComputePointVolume |
( |
double & |
totalVolume, |
|
|
bool |
markVisibleFaces |
|
) |
| |
|
private |
◆ DoubleTriangle()
| ICHullError tesseract_collision::VHACD::ICHull::DoubleTriangle |
( |
| ) |
|
|
private |
DoubleTriangle builds the initial double triangle. It first finds 3 noncollinear points and makes two faces out of them, in opposite order. It then finds a fourth point that is not coplanar with that face. The vertices are stored in the face structure in counterclockwise order so that the volume between the face and the point is negative. Lastly, the 3 newfaces to the fourth point are constructed and the data structures are cleaned up.
◆ FindMaxVolumePoint()
| bool tesseract_collision::VHACD::ICHull::FindMaxVolumePoint |
( |
const double |
minVolume = 0.0 | ) |
|
|
private |
◆ GetMesh()
| TMMesh & tesseract_collision::VHACD::ICHull::GetMesh |
( |
| ) |
|
|
inline |
Returns the computed mesh.
◆ IsFlat()
| bool tesseract_collision::VHACD::ICHull::IsFlat |
( |
| ) |
|
|
inline |
◆ IsInside()
| bool tesseract_collision::VHACD::ICHull::IsInside |
( |
const Vec3< double > & |
pt0, |
|
|
const double |
eps = 0.0 |
|
) |
| |
◆ MakeCCW()
◆ MakeConeFace()
◆ MakeFace()
MakeFace creates a new face structure from three vertices (in ccw order). It returns a pointer to the face.
◆ operator=()
| const ICHull & tesseract_collision::VHACD::ICHull::operator= |
( |
ICHull & |
rhs | ) |
|
◆ Process() [1/2]
| ICHullError tesseract_collision::VHACD::ICHull::Process |
( |
| ) |
|
◆ Process() [2/2]
| ICHullError tesseract_collision::VHACD::ICHull::Process |
( |
const uint32_t |
nPointsCH, |
|
|
const double |
minVolume = 0.0 |
|
) |
| |
◆ ProcessPoint()
| bool tesseract_collision::VHACD::ICHull::ProcessPoint |
( |
| ) |
|
|
private |
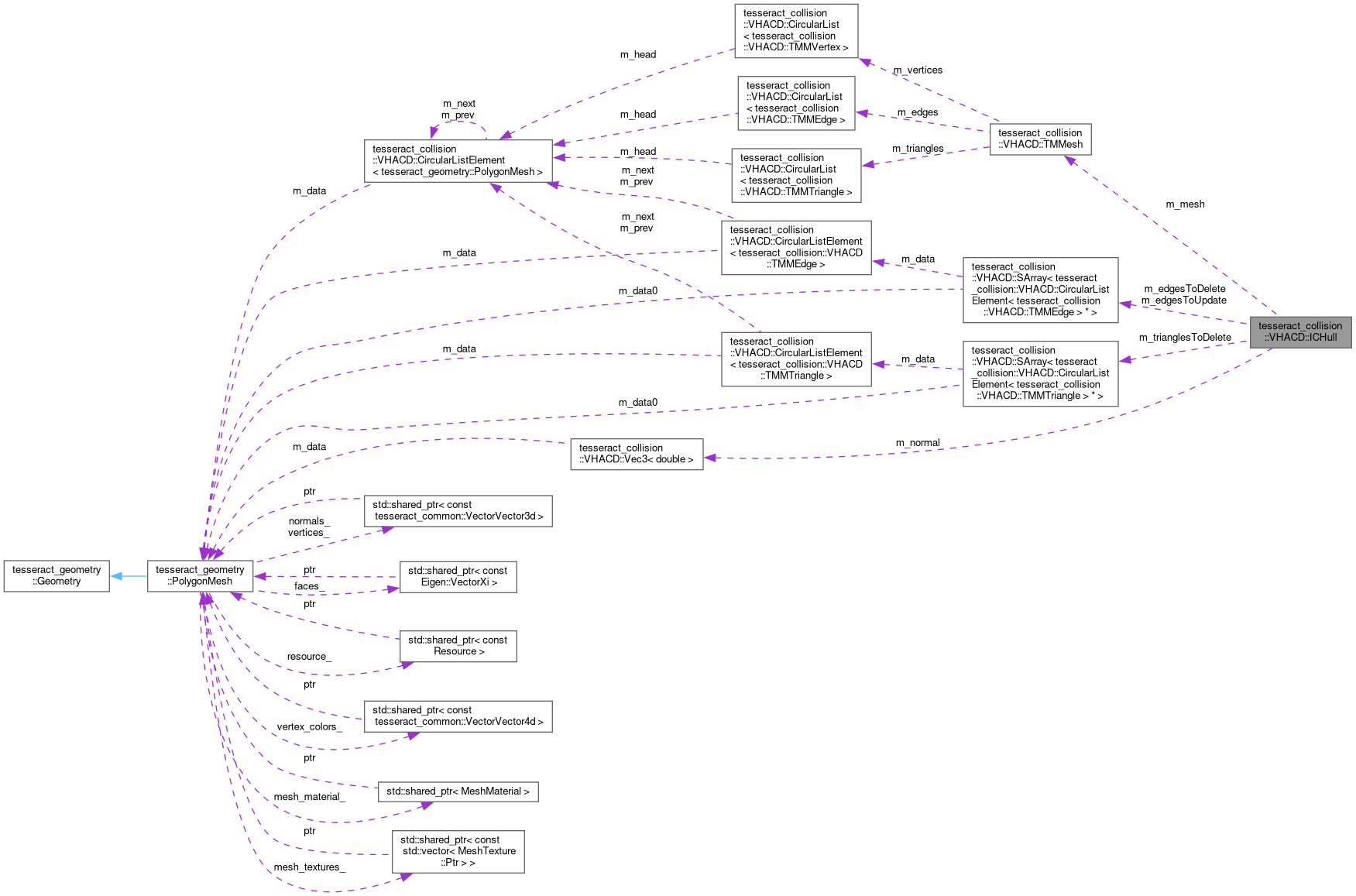
◆ m_edgesToDelete
◆ m_edgesToUpdate
◆ m_isFlat
| bool tesseract_collision::VHACD::ICHull::m_isFlat |
|
private |
◆ m_mesh
| TMMesh tesseract_collision::VHACD::ICHull::m_mesh |
|
private |
◆ m_normal
| Vec3<double> tesseract_collision::VHACD::ICHull::m_normal |
|
private |
◆ m_trianglesToDelete
◆ sc_dummyIndex
| const int32_t tesseract_collision::VHACD::ICHull::sc_dummyIndex = std::numeric_limits<int32_t>::max() |
|
staticprivate |
◆ sc_eps
| const double tesseract_collision::VHACD::ICHull::sc_eps = 1.0e-15 |
|
static |
The documentation for this class was generated from the following files: