|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
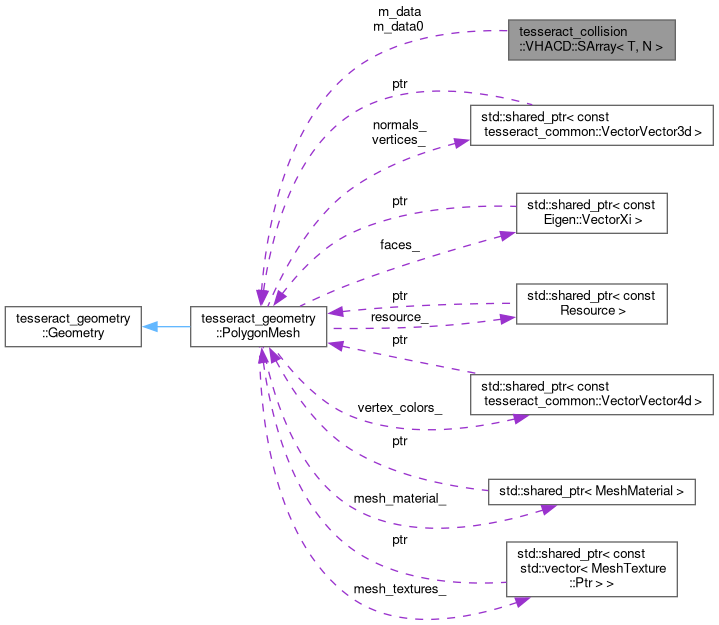
#include <vhacdSArray.h>
Public Member Functions | |
| T & | operator[] (size_t i) |
| const T & | operator[] (size_t i) const |
| size_t | Size () const |
| T * | Data () |
| const T * | Data () const |
| void | Clear () |
| void | PopBack () |
| void | Allocate (size_t size) |
| void | Resize (size_t size) |
| void | PushBack (const T &value) |
| bool | Find (const T &value, size_t &pos) |
| bool | Insert (const T &value) |
| bool | Erase (const T &value) |
| void | operator= (const SArray &rhs) |
| void | Initialize () |
| SArray (const SArray &rhs) | |
| SArray () | |
| ~SArray () | |
Private Attributes | |
| T | m_data0 [N] |
| T * | m_data |
| size_t | m_size |
| size_t | m_maxSize |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
private |
|
private |
|
private |
|
private |