|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <gtest/gtest.h>#include <Eigen/Geometry>#include <tesseract_common/utils.h>#include <tesseract_urdf/urdf_parser.h>#include <tesseract_support/tesseract_support_resource_locator.h>#include "tesseract_urdf_common_unit.h"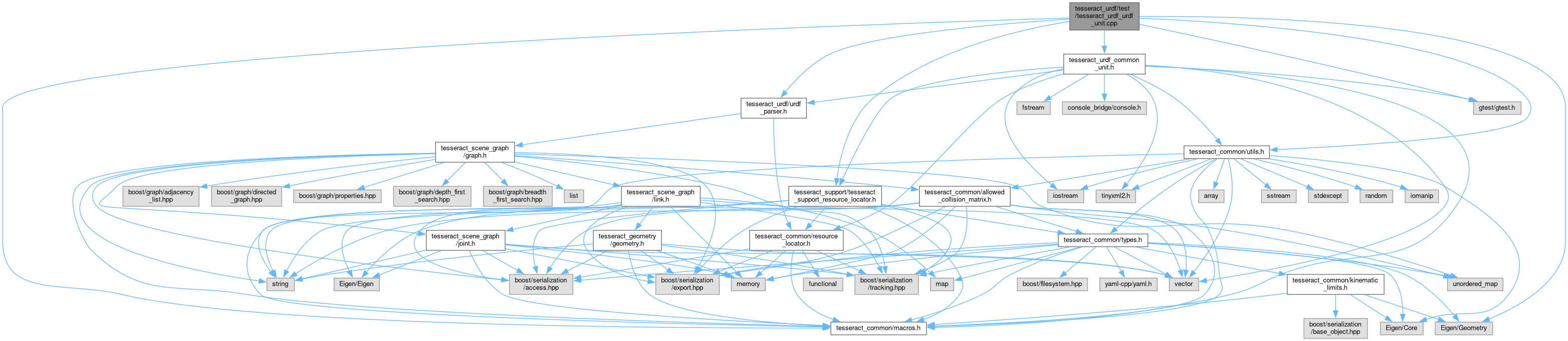
Variables | |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH | TESSERACT_COMMON_IGNORE_WARNINGS_POP |
| tesseract_scene_graph::SceneGraph::Ptr | sg = tesseract_urdf::parseURDFString(str, resource_locator) |
| std::string | urdf_file = std::string(TESSERACT_SUPPORT_DIR) + "/urdf/lbr_iiwa_14_r820.urdf" |
| tesseract_common::TesseractSupportResourceLocator | locator |
| auto | g = tesseract_urdf::parseURDFFile(urdf_file, locator) |
| auto | path = g->getShortestPath("link_1", "link_4") |
| tesseract_scene_graph::Link::Ptr | link_0 = std::make_shared<tesseract_scene_graph::Link>("link_0") |
| tesseract_scene_graph::Link::Ptr | link_1 = std::make_shared<tesseract_scene_graph::Link>("link_1") |
| tesseract_scene_graph::Joint::Ptr | joint_0 = std::make_shared<tesseract_scene_graph::Joint>("joint_0") |
| joint_0 | type = tesseract_scene_graph::JointType::FIXED |
| joint_0 | parent_link_name = link_0->getName() |
| joint_0 | child_link_name = link_1->getName() |
| bool | success = true |
| try | |
| catch | ( | ... | ) |
| EXPECT_ANY_THROW | ( | tesseract_urdf::parseURDFString(str, resource_locator) | ) |
| EXPECT_EQ | ( | sg-> | getLink("l1") ->visual->material->getName()[0], |
| "test_material" | |||
| ) |
| EXPECT_TRUE | ( | g-> | getJoints).size( = =9 | ) |
| EXPECT_TRUE | ( | g-> | isTree() | ) |
| EXPECT_TRUE | ( | sg ! | = nullptr | ) |
| EXPECT_TRUE | ( | sg-> | getJoints).size( = =1 | ) |
| EXPECT_TRUE | ( | sg-> | getName() = ="test" | ) |
| EXPECT_TRUE | ( | success | ) |
| g saveDOT | ( | tesseract_common::getTempPath()+"tesseract_urdf_import.dot" | ) |
| std::cout<< path<< std::endl;EXPECT_TRUE(path.links.size()==4);EXPECT_TRUE(std::find(path.links.begin(), path.links.end(), "link_1") !=path.links.end());EXPECT_TRUE(std::find(path.links.begin(), path.links.end(), "link_2") !=path.links.end());EXPECT_TRUE(std::find(path.links.begin(), path.links.end(), "link_3") !=path.links.end());EXPECT_TRUE(std::find(path.links.begin(), path.links.end(), "link_4") !=path.links.end());EXPECT_TRUE(path.joints.size()==3);EXPECT_TRUE(std::find(path.joints.begin(), path.joints.end(), "joint_a2") !=path.joints.end());EXPECT_TRUE(std::find(path.joints.begin(), path.joints.end(), "joint_a3") !=path.joints.end());EXPECT_TRUE(std::find(path.joints.begin(), path.joints.end(), "joint_a4") !=path.joints.end());} { { tesseract_scene_graph::SceneGraph::Ptr sg=nullptr;bool success=true;try { tesseract_urdf::writeURDFFile(sg, "/tmp/", "urdf0.urdf");} catch(...) { success=false;} EXPECT_FALSE(success);} { tesseract_scene_graph::SceneGraph::Ptr sg=std::make_shared< tesseract_scene_graph::SceneGraph > | ( | ) |
| sg addJoint * joint_0 = std::make_shared<tesseract_scene_graph::Joint>("joint_0") |
| sg addLink * link_0 = std::make_shared<tesseract_scene_graph::Link>("link_0") |
| sg addLink * link_1 = std::make_shared<tesseract_scene_graph::Link>("link_1") |
| tesseract_scene_graph::SceneGraph::Ptr sg = tesseract_urdf::parseURDFString(str, resource_locator) |
| bool success = true |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH TESSERACT_COMMON_IGNORE_WARNINGS_POP |
| try |
| std::string urdf_file = std::string(TESSERACT_SUPPORT_DIR) + "/urdf/lbr_iiwa_14_r820.urdf" |