#include <joint.h>
|
| template<class Archive > |
| void | serialize (Archive &ar, const unsigned int version) |
| |
◆ ConstPtr
◆ Ptr
◆ Joint() [1/4]
| tesseract_scene_graph::Joint::Joint |
( |
std::string |
name | ) |
|
|
inline |
◆ Joint() [2/4]
| tesseract_scene_graph::Joint::Joint |
( |
| ) |
|
|
default |
◆ ~Joint()
| tesseract_scene_graph::Joint::~Joint |
( |
| ) |
|
|
default |
◆ Joint() [3/4]
| tesseract_scene_graph::Joint::Joint |
( |
const Joint & |
other | ) |
|
|
delete |
◆ Joint() [4/4]
| tesseract_scene_graph::Joint::Joint |
( |
Joint && |
other | ) |
|
|
default |
◆ clear()
| void tesseract_scene_graph::Joint::clear |
( |
| ) |
|
|
inline |
◆ clone() [1/2]
| Joint tesseract_scene_graph::Joint::clone |
( |
| ) |
const |
|
inline |
Clone the joint keeping the name.
- Returns
- Cloned joint
◆ clone() [2/2]
| Joint tesseract_scene_graph::Joint::clone |
( |
const std::string & |
name | ) |
const |
|
inline |
◆ getName()
| const std::string & tesseract_scene_graph::Joint::getName |
( |
| ) |
const |
|
inline |
◆ operator!=()
| bool tesseract_scene_graph::Joint::operator!= |
( |
const Joint & |
rhs | ) |
const |
◆ operator=() [1/2]
| Joint & tesseract_scene_graph::Joint::operator= |
( |
const Joint & |
other | ) |
|
|
delete |
◆ operator=() [2/2]
| Joint & tesseract_scene_graph::Joint::operator= |
( |
Joint && |
other | ) |
|
|
default |
◆ operator==()
| bool tesseract_scene_graph::Joint::operator== |
( |
const Joint & |
rhs | ) |
const |
◆ serialize()
template<class Archive >
| void tesseract_scene_graph::Joint::serialize |
( |
Archive & |
ar, |
|
|
const unsigned int |
version |
|
) |
| |
|
private |
◆ boost::serialization::access
| friend class boost::serialization::access |
|
friend |
◆ axis
| Eigen::Vector3d tesseract_scene_graph::Joint::axis |
\brief type_ meaning of axis_
UNKNOWN unknown type REVOLUTE rotation axis PRISMATIC translation axis FLOATING N/A PLANAR plane normal axis FIXED N/A
◆ calibration
Unsupported Hidden Feature.
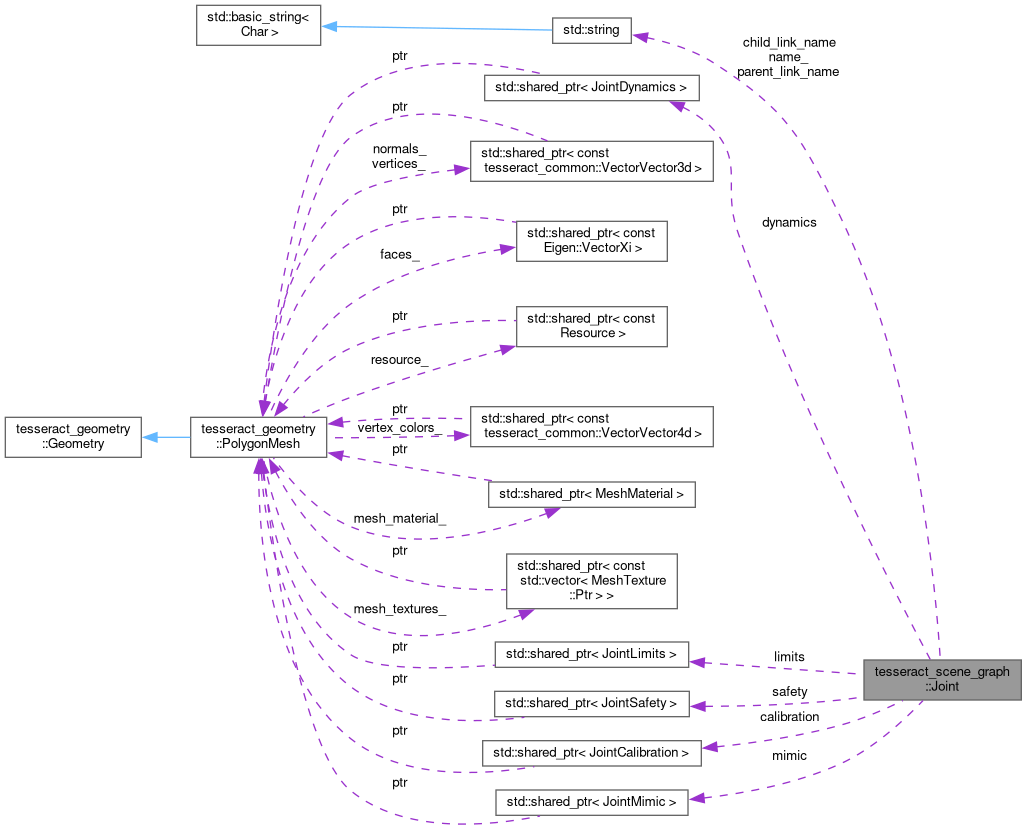
◆ child_link_name
| std::string tesseract_scene_graph::Joint::child_link_name |
child Link element child link frame is the same as the Joint frame
◆ dynamics
◆ limits
◆ mimic
Option to Mimic another Joint.
◆ name_
| std::string tesseract_scene_graph::Joint::name_ |
|
private |
◆ parent_link_name
| std::string tesseract_scene_graph::Joint::parent_link_name |
parent Link element origin specifies the transform from Parent Link to Joint Frame
◆ parent_to_joint_origin_transform
| Eigen::Isometry3d tesseract_scene_graph::Joint::parent_to_joint_origin_transform { Eigen::Isometry3d::Identity() } |
transform from Parent Link frame to Joint frame
◆ safety
Unsupported Hidden Feature.
◆ type
The documentation for this class was generated from the following files:
- tesseract_scene_graph/include/tesseract_scene_graph/joint.h
- tesseract_scene_graph/src/joint.cpp