|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <gtest/gtest.h>#include <Eigen/Geometry>#include <tesseract_geometry/impl/box.h>#include <tesseract_urdf/box.h>#include <tesseract_urdf/link.h>#include <tesseract_support/tesseract_support_resource_locator.h>#include "tesseract_urdf_common_unit.h"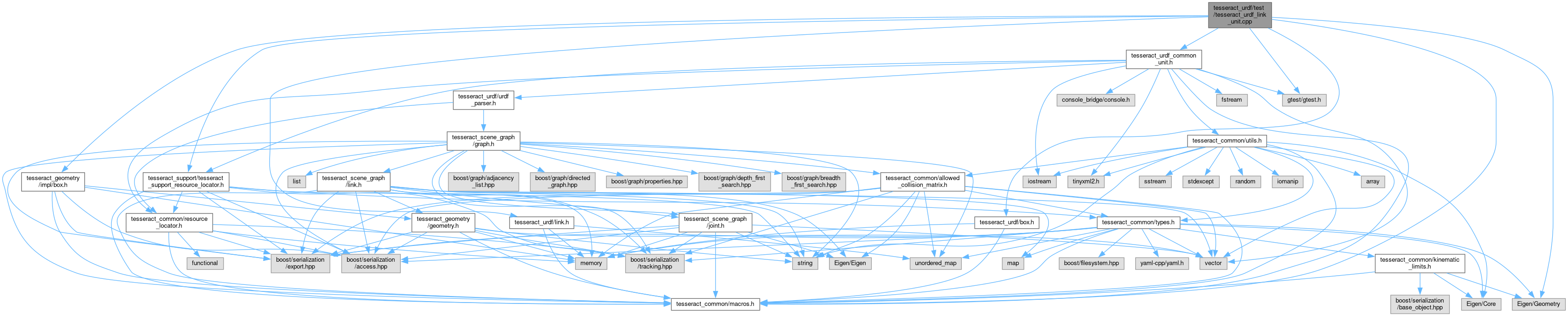
Functions | |
| EXPECT_TRUE (runTest< tesseract_scene_graph::Link::Ptr >(elem, &tesseract_urdf::parseLink, str, "link", resource_locator, empty_available_materials, 2)) | |
| EXPECT_TRUE (elem->getName()=="my_link") | |
| EXPECT_TRUE (elem->inertial !=nullptr) | |
| EXPECT_TRUE (elem->visual.size()==1) | |
| EXPECT_TRUE (elem->collision.size()==1) | |
| EXPECT_TRUE (empty_available_materials.size()==1) | |
| EXPECT_TRUE (elem->inertial==nullptr) | |
| EXPECT_FALSE (runTest< tesseract_scene_graph::Link::Ptr >(elem, &tesseract_urdf::parseLink, str, "link", resource_locator, empty_available_materials, 2)) | |
Variables | |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH | TESSERACT_COMMON_IGNORE_WARNINGS_POP |
| std::string | str |
| tesseract_scene_graph::Link::Ptr | elem |
| EXPECT_FALSE | ( | runTest< tesseract_scene_graph::Link::Ptr > | elem, &tesseract_urdf::parseLink, str, "link", resource_locator, empty_available_materials, 2 | ) |
| EXPECT_TRUE | ( | elem->collision. | size() = =1 | ) |
| EXPECT_TRUE | ( | elem-> | getName() = ="my_link" | ) |
| EXPECT_TRUE | ( | elem-> | inertial = =nullptr | ) |
| EXPECT_TRUE | ( | elem->visual. | size() = =1 | ) |
| EXPECT_TRUE | ( | empty_available_materials. | size() = =1 | ) |
| EXPECT_TRUE | ( | runTest< tesseract_scene_graph::Link::Ptr > | elem, &tesseract_urdf::parseLink, str, "link", resource_locator, empty_available_materials, 2 | ) |
| std::string str |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH TESSERACT_COMMON_IGNORE_WARNINGS_POP |