|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <ignition/msgs/MessageTypes.hh>#include <ignition/common/Console.hh>#include <ignition/math/eigen3/Conversions.hh>#include <chrono>#include <numeric>#include <tesseract_visualization/ignition/tesseract_ignition_visualization.h>#include <tesseract_visualization/ignition/conversions.h>#include <tesseract_visualization/trajectory_player.h>#include <tesseract_visualization/markers/arrow_marker.h>#include <tesseract_visualization/markers/axis_marker.h>#include <tesseract_visualization/markers/contact_results_marker.h>#include <tesseract_visualization/markers/toolpath_marker.h>#include <tesseract_common/class_loader.h>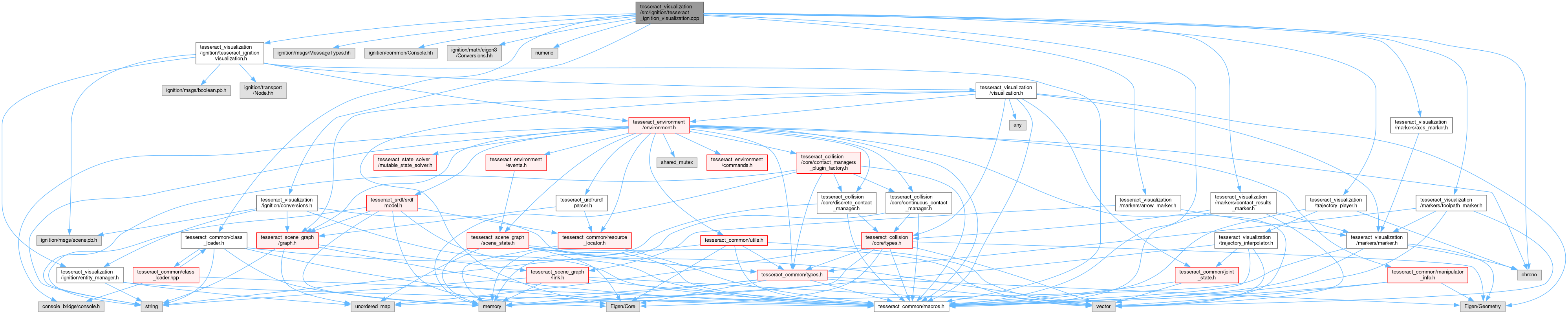
Namespaces | |
| namespace | tesseract_visualization |
Functions | |
| void | tesseract_visualization::addArrow (EntityManager &entity_manager, ignition::msgs::Link &link, long &sub_index, const ArrowMarker &marker) |
| void | tesseract_visualization::addCylinder (EntityManager &entity_manager, ignition::msgs::Link &link, long &sub_index, const Eigen::Ref< const Eigen::Vector3d > &pt1, const Eigen::Ref< const Eigen::Vector3d > &pt2, const tesseract_scene_graph::Material &material, const Eigen::Vector3d &) |
| void | tesseract_visualization::addAxis (EntityManager &entity_manager, ignition::msgs::Link &link, long &sub_index, const AxisMarker &m) |
Variables | |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH static TESSERACT_COMMON_IGNORE_WARNINGS_POP const std::string | DEFAULT_SCENE_TOPIC_NAME = "/tesseract_ignition/topic/scene" |
| Message type is ignition::msgs::Scene. More... | |
| static const std::string | DEFAULT_POSE_TOPIC_NAME = "/tesseract_ignition/topic/pose" |
| Message type is ignition::msgs::Pose_V. More... | |
| static const std::string | DEFAULT_DELETION_TOPIC_NAME = "/tesseract_ignition/topic/deletion" |
| Message type is ignition::msgs::UInt32_V. More... | |
| static const std::string | COLLISION_RESULTS_MODEL_NAME = "tesseract_collision_results_model" |
| static const std::string | AXES_MODEL_NAME = "tesseract_axes_model" |
| static const std::string | ARROW_MODEL_NAME = "tesseract_arrow_model" |
| static const std::string | TOOL_PATH_MODEL_NAME = "tesseract_tool_path_model" |
|
static |
|
static |
|
static |
|
static |
Message type is ignition::msgs::UInt32_V.
|
static |
Message type is ignition::msgs::Pose_V.
|
static |
Message type is ignition::msgs::Scene.
|
static |