|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <gtest/gtest.h>#include <tesseract_kinematics/kdl/kdl_fwd_kin_chain.h>#include <tesseract_kinematics/core/utils.h>#include "kinematics_test_utils.h"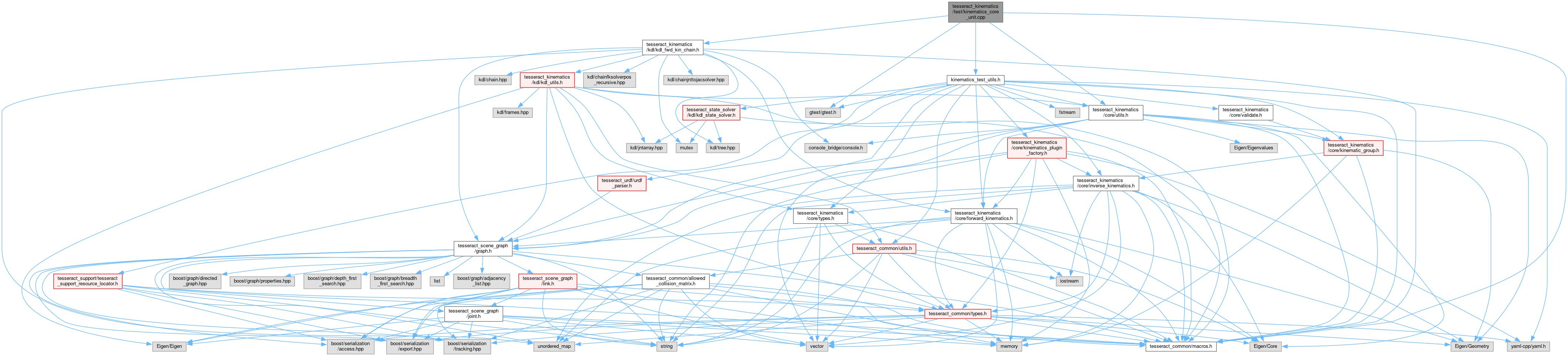
Functions | |
| EXPECT_NEAR (q[0], M_PI_4, 1e-6) | |
| EXPECT_NEAR (q[1], -M_PI_4, 1e-6) | |
| EXPECT_NEAR (q[0], -3 *M_PI_4, 1e-6) | |
| EXPECT_NEAR (q[1], 3 *M_PI_4, 1e-6) | |
| template<typename FloatType > | |
| void | runRedundantSolutionsTest () |
| runRedundantSolutionsTest< double > () | |
| EXPECT_TRUE (tesseract_kinematics::isNearSingularity(jacobian, 0.001)) | |
| EXPECT_TRUE (tesseract_kinematics::isNearSingularity(jacobian)) | |
| EXPECT_FALSE (tesseract_kinematics::isNearSingularity(jacobian)) | |
| EXPECT_TRUE (tesseract_kinematics::isNearSingularity(jacobian, 0.02)) | |
| EXPECT_EQ (m.m.eigen_values.size(), 6) | |
| EXPECT_NEAR (m.m.volume, 0, 1e-6) | |
| EXPECT_GT (m.m.condition, 1e+20) | |
| EXPECT_EQ (m.m_linear.eigen_values.size(), 3) | |
| EXPECT_NEAR (m.m_linear.eigen_values[0], 0.18153054745434696, 1e-6) | |
| EXPECT_NEAR (m.m_linear.eigen_values[1], 0.8835999999999999, 1e-6) | |
| EXPECT_NEAR (m.m_linear.eigen_values[2], 1.960719452545653, 1e-6) | |
| EXPECT_NEAR (m.m_linear.condition, 10.801044122002406, 1e-6) | |
| EXPECT_NEAR (m.m_linear.measure, 3.286494199295414, 1e-6) | |
| EXPECT_NEAR (m.m_linear.volume, 0.5608031457314142, 1e-6) | |
| EXPECT_EQ (m.m_angular.eigen_values.size(), 3) | |
| EXPECT_NEAR (m.m_angular.eigen_values[0], 1.0, 1e-6) | |
| EXPECT_NEAR (m.m_angular.eigen_values[1], 2.0, 1e-6) | |
| EXPECT_NEAR (m.m_angular.eigen_values[2], 3.0, 1e-6) | |
| EXPECT_NEAR (m.m_angular.condition, 3.0, 1e-6) | |
| EXPECT_NEAR (m.m_angular.measure, 1.7320508075688772, 1e-6) | |
| EXPECT_NEAR (m.m_angular.volume, 2.449489742783178, 1e-6) | |
| EXPECT_EQ (m.f.eigen_values.size(), 6) | |
| EXPECT_EQ (m.f_linear.eigen_values.size(), 3) | |
| EXPECT_NEAR (m.f_linear.eigen_values[0], 0.5100168709509535, 1e-6) | |
| EXPECT_NEAR (m.f_linear.eigen_values[1], 1.1317338162064283, 1e-6) | |
| EXPECT_NEAR (m.f_linear.eigen_values[2], 5.508714726106856, 1e-6) | |
| EXPECT_NEAR (m.f_linear.condition, 10.801044122002406, 1e-6) | |
| EXPECT_NEAR (m.f_linear.measure, 3.286494199295414, 1e-6) | |
| EXPECT_NEAR (m.f_linear.volume, 1.783156902045858, 1e-6) | |
| EXPECT_EQ (m.f_angular.eigen_values.size(), 3) | |
| EXPECT_NEAR (m.f_angular.eigen_values[0], 0.3333333333333333, 1e-6) | |
| EXPECT_NEAR (m.f_angular.eigen_values[1], 0.5, 1e-6) | |
| EXPECT_NEAR (m.f_angular.eigen_values[2], 1.0, 1e-6) | |
| EXPECT_NEAR (m.f_angular.condition, 3.0, 1e-6) | |
| EXPECT_NEAR (m.f_angular.measure, 1.7320508075688774, 1e-6) | |
| EXPECT_NEAR (m.f_angular.volume, 0.408248290463863, 1e-6) | |
| int | main (int argc, char **argv) |
Variables | |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH TESSERACT_COMMON_IGNORE_WARNINGS_POP static const std::string | FACTORY_NAME = "TestFactory" |
| q [0] = (4 * M_PI) + M_PI_4 | |
| tesseract_kinematics::KDLFwdKinChain fwd_kin * | scene_graph |
| Eigen::VectorXd | jv = Eigen::VectorXd::Zero(6) |
| Eigen::MatrixXd | jacobian = fwd_kin.calcJacobian(jv, "tool0") |
| tesseract_kinematics::Manipulability | m = tesseract_kinematics::calcManipulability(jacobian) |
| EXPECT_EQ | ( | m.f.eigen_values. | size(), |
| 6 | |||
| ) |
| EXPECT_EQ | ( | m.f_angular.eigen_values. | size(), |
| 3 | |||
| ) |
| EXPECT_EQ | ( | m.f_linear.eigen_values. | size(), |
| 3 | |||
| ) |
| EXPECT_EQ | ( | m.m.eigen_values. | size(), |
| 6 | |||
| ) |
| EXPECT_EQ | ( | m.m_angular.eigen_values. | size(), |
| 3 | |||
| ) |
| EXPECT_EQ | ( | m.m_linear.eigen_values. | size(), |
| 3 | |||
| ) |
| EXPECT_FALSE | ( | tesseract_kinematics::isNearSingularity(jacobian) | ) |
| EXPECT_GT | ( | m.m. | condition, |
| 1e+ | 20 | ||
| ) |
| EXPECT_NEAR | ( | m.f_angular. | condition, |
| 3. | 0, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_angular. | eigen_values[0], |
| 0. | 3333333333333333, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_angular. | eigen_values[1], |
| 0. | 5, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_angular. | eigen_values[2], |
| 1. | 0, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_angular. | measure, |
| 1. | 7320508075688774, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_angular. | volume, |
| 0. | 408248290463863, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_linear. | condition, |
| 10. | 801044122002406, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_linear. | eigen_values[0], |
| 0. | 5100168709509535, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_linear. | eigen_values[1], |
| 1. | 1317338162064283, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_linear. | eigen_values[2], |
| 5. | 508714726106856, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_linear. | measure, |
| 3. | 286494199295414, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.f_linear. | volume, |
| 1. | 783156902045858, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m. | volume, |
| 0 | , | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_angular. | condition, |
| 3. | 0, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_angular. | eigen_values[0], |
| 1. | 0, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_angular. | eigen_values[1], |
| 2. | 0, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_angular. | eigen_values[2], |
| 3. | 0, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_angular. | measure, |
| 1. | 7320508075688772, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_angular. | volume, |
| 2. | 449489742783178, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_linear. | condition, |
| 10. | 801044122002406, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_linear. | eigen_values[0], |
| 0. | 18153054745434696, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_linear. | eigen_values[1], |
| 0. | 8835999999999999, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_linear. | eigen_values[2], |
| 1. | 960719452545653, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_linear. | measure, |
| 3. | 286494199295414, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | m.m_linear. | volume, |
| 0. | 5608031457314142, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | q | [0], |
| -3 * | M_PI_4, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | q | [0], |
| M_PI_4 | , | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | q | [1], |
| - | M_PI_4, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_NEAR | ( | q | [1], |
| 3 * | M_PI_4, | ||
| 1e- | 6 | ||
| ) |
| EXPECT_TRUE | ( | tesseract_kinematics::isNearSingularity(jacobian) | ) |
| EXPECT_TRUE | ( | tesseract_kinematics::isNearSingularity(jacobian, 0.001) | ) |
| EXPECT_TRUE | ( | tesseract_kinematics::isNearSingularity(jacobian, 0.02) | ) |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| void runRedundantSolutionsTest | ( | ) |
| runRedundantSolutionsTest< double > | ( | ) |
|
static |
| Eigen::MatrixXd jacobian = fwd_kin.calcJacobian(jv, "tool0") |
| Eigen::VectorXd jv = Eigen::VectorXd::Zero(6) |
| Collision m = tesseract_kinematics::calcManipulability(jacobian) |
| q[1] = (4 * M_PI) + M_PI_4 |
| tesseract_kinematics::KDLFwdKinChain fwd_kin* scene_graph |