|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
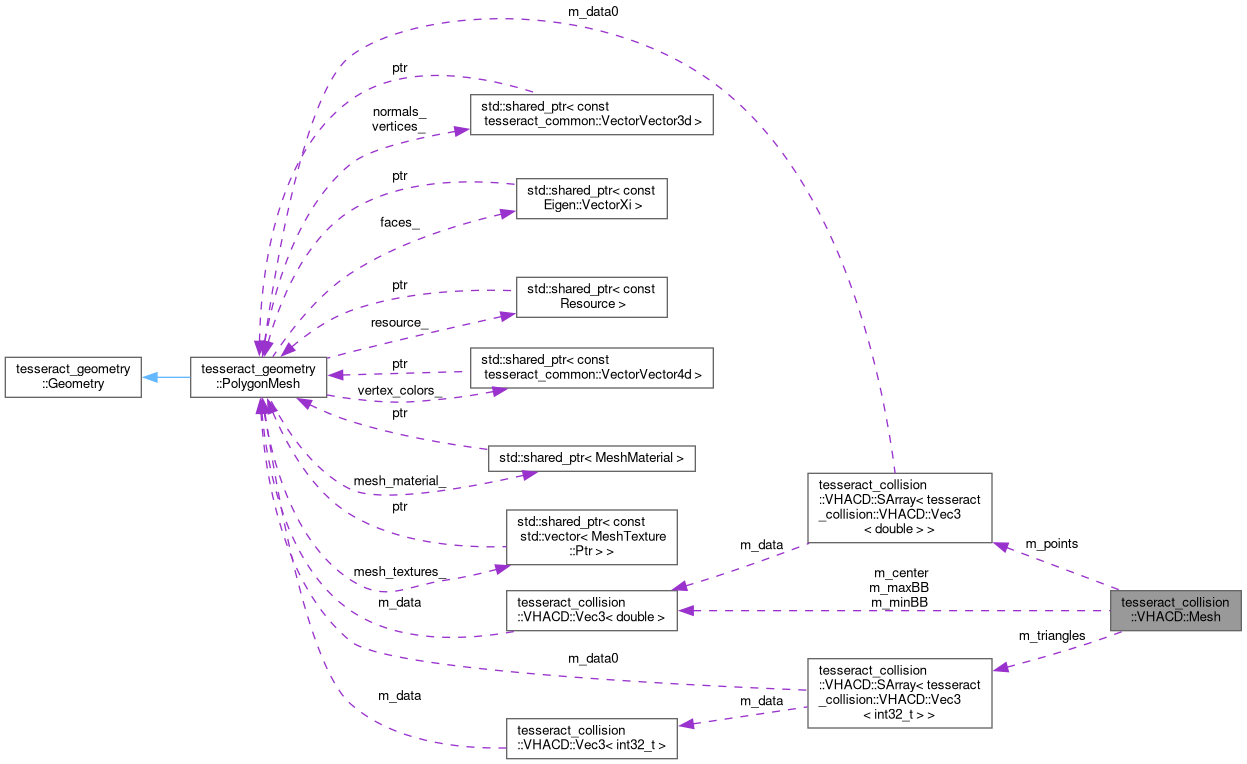
Triangular mesh data structure. More...
#include <vhacdMesh.h>
Public Member Functions | |
| void | AddPoint (const Vec3< double > &pt) |
| void | SetPoint (size_t index, const Vec3< double > &pt) |
| const Vec3< double > & | GetPoint (size_t index) const |
| Vec3< double > & | GetPoint (size_t index) |
| size_t | GetNPoints () const |
| double * | GetPoints () |
| const double * | GetPoints () const |
| const Vec3< double > * | GetPointsBuffer () const |
| Vec3< double > * | GetPointsBuffer () |
| void | AddTriangle (const Vec3< int32_t > &tri) |
| void | SetTriangle (size_t index, const Vec3< int32_t > &tri) |
| const Vec3< int32_t > & | GetTriangle (size_t index) const |
| Vec3< int32_t > & | GetTriangle (size_t index) |
| size_t | GetNTriangles () const |
| int32_t * | GetTriangles () |
| const int32_t * | GetTriangles () const |
| const Vec3< int32_t > * | GetTrianglesBuffer () const |
| Vec3< int32_t > * | GetTrianglesBuffer () |
| const Vec3< double > & | GetCenter () const |
| const Vec3< double > & | GetMinBB () const |
| const Vec3< double > & | GetMaxBB () const |
| void | ClearPoints () |
| void | ClearTriangles () |
| void | Clear () |
| void | ResizePoints (size_t nPts) |
| void | ResizeTriangles (size_t nTri) |
| void | CopyPoints (SArray< Vec3< double > > &points) const |
| double | GetDiagBB () const |
| double | ComputeVolume () const |
| void | ComputeConvexHull (const double *const pts, const size_t nPts) |
| void | Clip (const Plane &plane, SArray< Vec3< double > > &positivePart, SArray< Vec3< double > > &negativePart) const |
| bool | IsInside (const Vec3< double > &pt) const |
| double | ComputeDiagBB () |
| Vec3< double > & | ComputeCenter (void) |
| bool | LoadOFF (const std::string &fileName, bool invert) |
| bool | SaveVRML2 (const std::string &fileName) const |
| bool | SaveVRML2 (std::ofstream &fout, const Material &material) const |
| bool | SaveOFF (const std::string &fileName) const |
| Mesh () | |
| Constructor. More... | |
| ~Mesh (void) | |
| Destructor. More... | |
Private Attributes | |
| SArray< Vec3< double > > | m_points |
| SArray< Vec3< int32_t > > | m_triangles |
| Vec3< double > | m_minBB |
| Vec3< double > | m_maxBB |
| Vec3< double > | m_center |
| double | m_diag |
Triangular mesh data structure.
| tesseract_collision::VHACD::Mesh::Mesh | ( | ) |
Constructor.
| tesseract_collision::VHACD::Mesh::~Mesh | ( | void | ) |
Destructor.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| void tesseract_collision::VHACD::Mesh::Clip | ( | const Plane & | plane, |
| SArray< Vec3< double > > & | positivePart, | ||
| SArray< Vec3< double > > & | negativePart | ||
| ) | const |
| Vec3< double > & tesseract_collision::VHACD::Mesh::ComputeCenter | ( | void | ) |
| void tesseract_collision::VHACD::Mesh::ComputeConvexHull | ( | const double *const | pts, |
| const size_t | nPts | ||
| ) |
| double tesseract_collision::VHACD::Mesh::ComputeDiagBB | ( | ) |
| double tesseract_collision::VHACD::Mesh::ComputeVolume | ( | ) | const |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| bool tesseract_collision::VHACD::Mesh::IsInside | ( | const Vec3< double > & | pt | ) | const |
| bool tesseract_collision::VHACD::Mesh::LoadOFF | ( | const std::string & | fileName, |
| bool | invert | ||
| ) |
|
inline |
|
inline |
| bool tesseract_collision::VHACD::Mesh::SaveOFF | ( | const std::string & | fileName | ) | const |
| bool tesseract_collision::VHACD::Mesh::SaveVRML2 | ( | const std::string & | fileName | ) | const |
| bool tesseract_collision::VHACD::Mesh::SaveVRML2 | ( | std::ofstream & | fout, |
| const Material & | material | ||
| ) | const |
|
inline |
|
inline |
|
private |
|
private |
|
private |
|
private |