|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
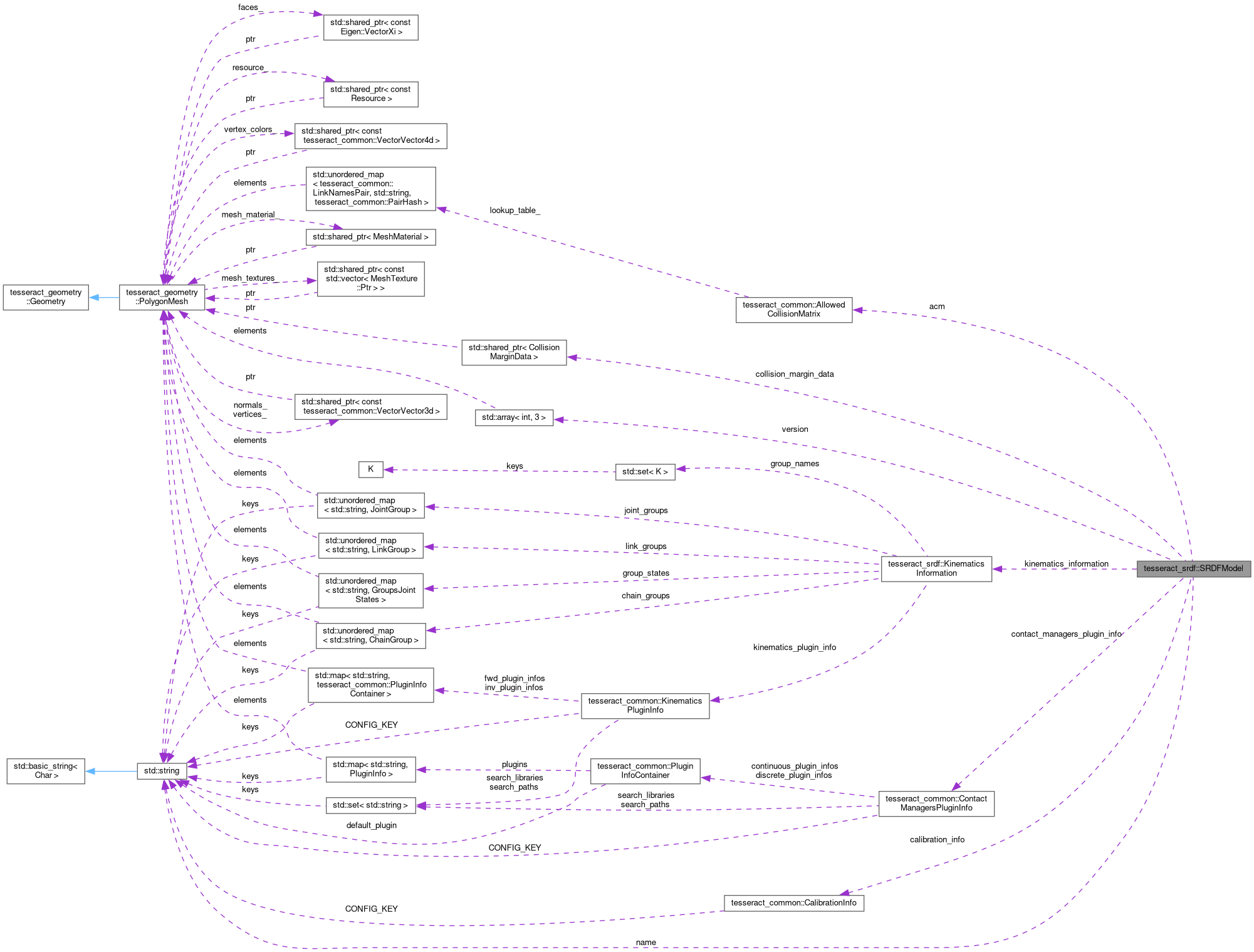
Representation of semantic information about the robot. More...
#include <srdf_model.h>
Public Types | |
| using | Ptr = std::shared_ptr< SRDFModel > |
| using | ConstPtr = std::shared_ptr< const SRDFModel > |
Public Member Functions | |
| SRDFModel ()=default | |
| virtual | ~SRDFModel ()=default |
| SRDFModel (const SRDFModel &)=default | |
| SRDFModel & | operator= (const SRDFModel &)=default |
| SRDFModel (SRDFModel &&)=default | |
| SRDFModel & | operator= (SRDFModel &&)=default |
| void | initFile (const tesseract_scene_graph::SceneGraph &scene_graph, const std::string &filename, const tesseract_common::ResourceLocator &locator) |
| Load Model given a filename. More... | |
| void | initString (const tesseract_scene_graph::SceneGraph &scene_graph, const std::string &xmlstring, const tesseract_common::ResourceLocator &locator) |
| Load Model from a XML-string. More... | |
| bool | saveToFile (const std::string &file_path) const |
| Save the model to a file. More... | |
| void | clear () |
| Clear the model. More... | |
| bool | operator== (const SRDFModel &rhs) const |
| bool | operator!= (const SRDFModel &rhs) const |
Public Attributes | |
| std::string | name { "undefined" } |
| The name of the srdf model. More... | |
| std::array< int, 3 > | version { { 1, 0, 0 } } |
| The version number major.minor[.patch]. More... | |
| KinematicsInformation | kinematics_information |
| Contact information related to kinematics. More... | |
| tesseract_common::ContactManagersPluginInfo | contact_managers_plugin_info |
| The contact managers plugin information. More... | |
| tesseract_common::AllowedCollisionMatrix | acm |
| The allowed collision matrix. More... | |
| tesseract_common::CollisionMarginData::Ptr | collision_margin_data |
| Collision margin data. More... | |
| tesseract_common::CalibrationInfo | calibration_info |
| The calibration information. More... | |
Private Member Functions | |
| template<class Archive > | |
| void | serialize (Archive &ar, const unsigned int version) |
Friends | |
| class | boost::serialization::access |
Representation of semantic information about the robot.
| using tesseract_srdf::SRDFModel::ConstPtr = std::shared_ptr<const SRDFModel> |
| using tesseract_srdf::SRDFModel::Ptr = std::shared_ptr<SRDFModel> |
|
default |
|
virtualdefault |
|
default |
|
default |
| void tesseract_srdf::SRDFModel::clear | ( | ) |
Clear the model.
| void tesseract_srdf::SRDFModel::initFile | ( | const tesseract_scene_graph::SceneGraph & | scene_graph, |
| const std::string & | filename, | ||
| const tesseract_common::ResourceLocator & | locator | ||
| ) |
Load Model given a filename.
| std::nested_exception | if an error occurs during parsing srdf |
| void tesseract_srdf::SRDFModel::initString | ( | const tesseract_scene_graph::SceneGraph & | scene_graph, |
| const std::string & | xmlstring, | ||
| const tesseract_common::ResourceLocator & | locator | ||
| ) |
Load Model from a XML-string.
| std::nested_exception | if an error occurs during parsing srdf |
| bool tesseract_srdf::SRDFModel::operator!= | ( | const SRDFModel & | rhs | ) | const |
| bool tesseract_srdf::SRDFModel::operator== | ( | const SRDFModel & | rhs | ) | const |
| bool tesseract_srdf::SRDFModel::saveToFile | ( | const std::string & | file_path | ) | const |
Save the model to a file.
|
private |
|
friend |
| tesseract_common::AllowedCollisionMatrix tesseract_srdf::SRDFModel::acm |
The allowed collision matrix.
| tesseract_common::CalibrationInfo tesseract_srdf::SRDFModel::calibration_info |
The calibration information.
| tesseract_common::CollisionMarginData::Ptr tesseract_srdf::SRDFModel::collision_margin_data |
Collision margin data.
| tesseract_common::ContactManagersPluginInfo tesseract_srdf::SRDFModel::contact_managers_plugin_info |
The contact managers plugin information.
| KinematicsInformation tesseract_srdf::SRDFModel::kinematics_information |
Contact information related to kinematics.
| std::string tesseract_srdf::SRDFModel::name { "undefined" } |
The name of the srdf model.
| std::array<int, 3> tesseract_srdf::SRDFModel::version { { 1, 0, 0 } } |
The version number major.minor[.patch].