|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
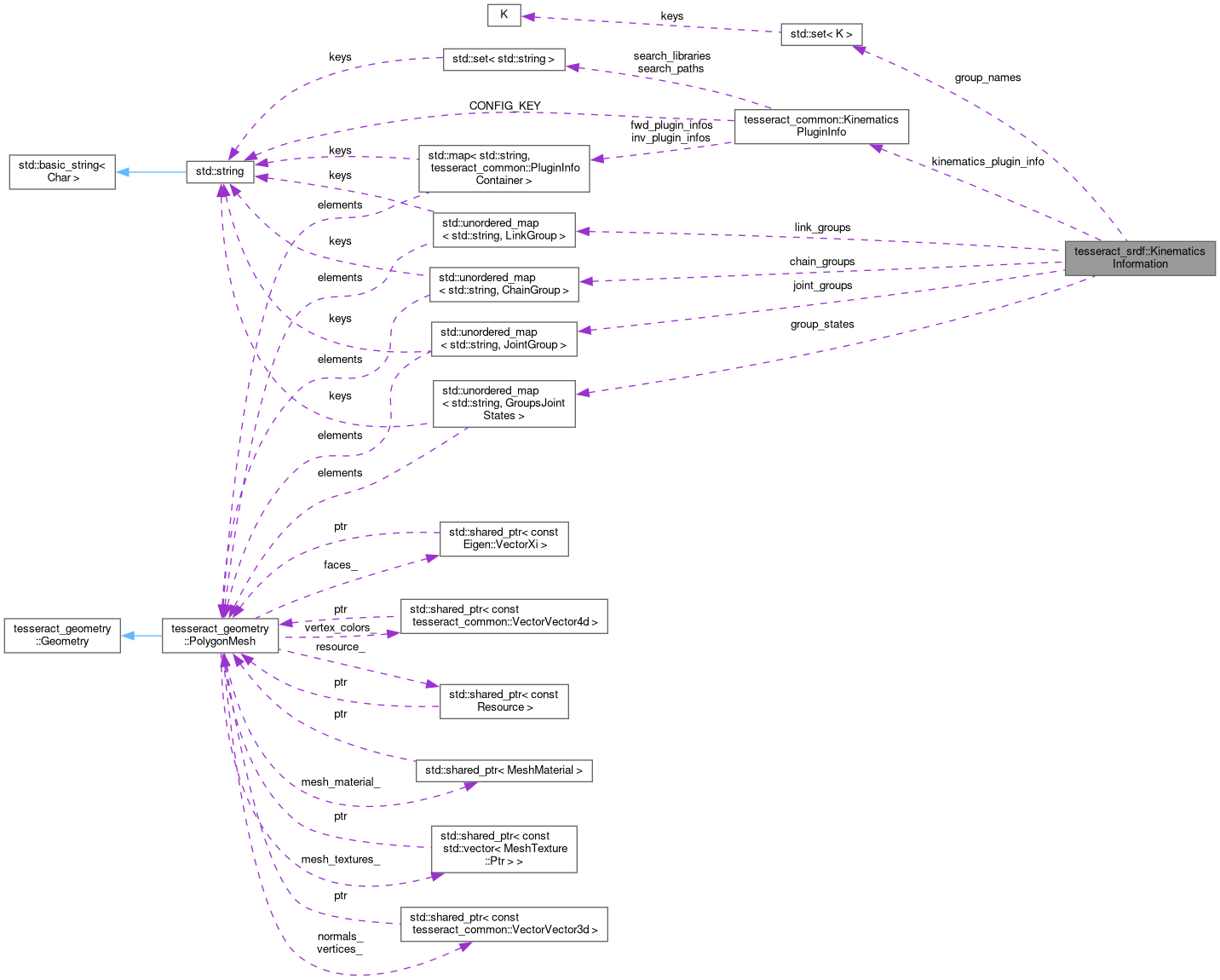
This hold the kinematics information used to create the SRDF and is the data container for the manipulator manager. More...
#include <kinematics_information.h>
Public Member Functions | |
| void | insert (const KinematicsInformation &other) |
| Insert the content of an other KinematicsInformation. More... | |
| void | clear () |
| Clear the kinematics information. More... | |
| bool | hasGroup (const std::string &group_name) const |
| Check if group exists. More... | |
| void | addChainGroup (const std::string &group_name, const ChainGroup &chain_group) |
| Add chain group. More... | |
| void | removeChainGroup (const std::string &group_name) |
| Remove chain group. More... | |
| bool | hasChainGroup (const std::string &group_name) const |
| Check if chain group exists. More... | |
| void | addJointGroup (const std::string &group_name, const JointGroup &joint_group) |
| Add joint group. More... | |
| void | removeJointGroup (const std::string &group_name) |
| Remove joint group. More... | |
| bool | hasJointGroup (const std::string &group_name) const |
| Check if joint group exists. More... | |
| void | addLinkGroup (const std::string &group_name, const LinkGroup &link_group) |
| Add link group. More... | |
| void | removeLinkGroup (const std::string &group_name) |
| Remove link group. More... | |
| bool | hasLinkGroup (const std::string &group_name) const |
| Check if link group exists. More... | |
| void | addGroupJointState (const std::string &group_name, const std::string &state_name, const GroupsJointState &joint_state) |
| Add group joint state. More... | |
| void | removeGroupJointState (const std::string &group_name, const std::string &state_name) |
| Remove group joint state. More... | |
| bool | hasGroupJointState (const std::string &group_name, const std::string &state_name) const |
| Check if group joint state exists. More... | |
| void | addGroupTCP (const std::string &group_name, const std::string &tcp_name, const Eigen::Isometry3d &tcp) |
| Add group tool center point. More... | |
| void | removeGroupTCP (const std::string &group_name, const std::string &tcp_name) |
| Remove group tool center point. More... | |
| bool | hasGroupTCP (const std::string &group_name, const std::string &tcp_name) const |
| Check if group tool center point exists. More... | |
| bool | operator== (const KinematicsInformation &rhs) const |
| bool | operator!= (const KinematicsInformation &rhs) const |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW GroupNames | group_names |
| A set of group names. More... | |
| ChainGroups | chain_groups |
| A map of chains groups. More... | |
| JointGroups | joint_groups |
| A map of joint groups. More... | |
| LinkGroups | link_groups |
| A map of link groups. More... | |
| GroupJointStates | group_states |
| A map of group states. More... | |
| GroupTCPs | group_tcps |
| A map of group tool center points. More... | |
| tesseract_common::KinematicsPluginInfo | kinematics_plugin_info |
| The kinematics plugin information. More... | |
Private Member Functions | |
| template<class Archive > | |
| void | serialize (Archive &ar, const unsigned int version) |
Friends | |
| class | boost::serialization::access |
This hold the kinematics information used to create the SRDF and is the data container for the manipulator manager.
| void tesseract_srdf::KinematicsInformation::addChainGroup | ( | const std::string & | group_name, |
| const ChainGroup & | chain_group | ||
| ) |
Add chain group.
| void tesseract_srdf::KinematicsInformation::addGroupJointState | ( | const std::string & | group_name, |
| const std::string & | state_name, | ||
| const GroupsJointState & | joint_state | ||
| ) |
Add group joint state.
| void tesseract_srdf::KinematicsInformation::addGroupTCP | ( | const std::string & | group_name, |
| const std::string & | tcp_name, | ||
| const Eigen::Isometry3d & | tcp | ||
| ) |
Add group tool center point.
| void tesseract_srdf::KinematicsInformation::addJointGroup | ( | const std::string & | group_name, |
| const JointGroup & | joint_group | ||
| ) |
Add joint group.
| void tesseract_srdf::KinematicsInformation::addLinkGroup | ( | const std::string & | group_name, |
| const LinkGroup & | link_group | ||
| ) |
Add link group.
| void tesseract_srdf::KinematicsInformation::clear | ( | ) |
Clear the kinematics information.
| bool tesseract_srdf::KinematicsInformation::hasChainGroup | ( | const std::string & | group_name | ) | const |
Check if chain group exists.
| bool tesseract_srdf::KinematicsInformation::hasGroup | ( | const std::string & | group_name | ) | const |
Check if group exists.
| bool tesseract_srdf::KinematicsInformation::hasGroupJointState | ( | const std::string & | group_name, |
| const std::string & | state_name | ||
| ) | const |
Check if group joint state exists.
| bool tesseract_srdf::KinematicsInformation::hasGroupTCP | ( | const std::string & | group_name, |
| const std::string & | tcp_name | ||
| ) | const |
Check if group tool center point exists.
| bool tesseract_srdf::KinematicsInformation::hasJointGroup | ( | const std::string & | group_name | ) | const |
Check if joint group exists.
| bool tesseract_srdf::KinematicsInformation::hasLinkGroup | ( | const std::string & | group_name | ) | const |
Check if link group exists.
| void tesseract_srdf::KinematicsInformation::insert | ( | const KinematicsInformation & | other | ) |
Insert the content of an other KinematicsInformation.
| bool tesseract_srdf::KinematicsInformation::operator!= | ( | const KinematicsInformation & | rhs | ) | const |
| bool tesseract_srdf::KinematicsInformation::operator== | ( | const KinematicsInformation & | rhs | ) | const |
| void tesseract_srdf::KinematicsInformation::removeChainGroup | ( | const std::string & | group_name | ) |
Remove chain group.
| void tesseract_srdf::KinematicsInformation::removeGroupJointState | ( | const std::string & | group_name, |
| const std::string & | state_name | ||
| ) |
Remove group joint state.
| void tesseract_srdf::KinematicsInformation::removeGroupTCP | ( | const std::string & | group_name, |
| const std::string & | tcp_name | ||
| ) |
Remove group tool center point.
| void tesseract_srdf::KinematicsInformation::removeJointGroup | ( | const std::string & | group_name | ) |
Remove joint group.
| void tesseract_srdf::KinematicsInformation::removeLinkGroup | ( | const std::string & | group_name | ) |
Remove link group.
|
private |
|
friend |
| ChainGroups tesseract_srdf::KinematicsInformation::chain_groups |
A map of chains groups.
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW GroupNames tesseract_srdf::KinematicsInformation::group_names |
A set of group names.
| GroupJointStates tesseract_srdf::KinematicsInformation::group_states |
A map of group states.
| GroupTCPs tesseract_srdf::KinematicsInformation::group_tcps |
A map of group tool center points.
| JointGroups tesseract_srdf::KinematicsInformation::joint_groups |
A map of joint groups.
| tesseract_common::KinematicsPluginInfo tesseract_srdf::KinematicsInformation::kinematics_plugin_info |
The kinematics plugin information.
| LinkGroups tesseract_srdf::KinematicsInformation::link_groups |
A map of link groups.