#include <allowed_collision_matrix.h>
|
| template<class Archive > |
| void | serialize (Archive &ar, const unsigned int version) |
| |
◆ ConstPtr
◆ Ptr
◆ AllowedCollisionMatrix() [1/3]
| tesseract_common::AllowedCollisionMatrix::AllowedCollisionMatrix |
( |
| ) |
|
|
default |
◆ ~AllowedCollisionMatrix()
| virtual tesseract_common::AllowedCollisionMatrix::~AllowedCollisionMatrix |
( |
| ) |
|
|
virtualdefault |
◆ AllowedCollisionMatrix() [2/3]
◆ AllowedCollisionMatrix() [3/3]
◆ addAllowedCollision()
| virtual void tesseract_common::AllowedCollisionMatrix::addAllowedCollision |
( |
const std::string & |
link_name1, |
|
|
const std::string & |
link_name2, |
|
|
const std::string & |
reason |
|
) |
| |
|
inlinevirtual |
Disable collision between two collision objects.
- Parameters
-
| obj1 | Collision object name |
| obj2 | Collision object name |
| reason | The reason for disabling collison |
◆ clearAllowedCollisions()
| void tesseract_common::AllowedCollisionMatrix::clearAllowedCollisions |
( |
| ) |
|
|
inline |
Clears the list of allowed collisions, so that no collision will be allowed.
◆ getAllAllowedCollisions()
Get all of the entries in the allowed collision matrix.
- Returns
- AllowedCollisionEntries an unordered map containing all allowed collision entries. The keys of the unordered map are a std::pair of the link names in the allowed collision pair.
◆ insertAllowedCollisionMatrix()
| void tesseract_common::AllowedCollisionMatrix::insertAllowedCollisionMatrix |
( |
const AllowedCollisionMatrix & |
acm | ) |
|
|
inline |
Inserts an allowable collision matrix ignoring duplicate pairs.
- Parameters
-
◆ isCollisionAllowed()
| virtual bool tesseract_common::AllowedCollisionMatrix::isCollisionAllowed |
( |
const std::string & |
link_name1, |
|
|
const std::string & |
link_name2 |
|
) |
| const |
|
inlinevirtual |
This checks if two links are allowed to be in collision.
- Parameters
-
| link_name1 | First link name |
| link_name2 | Second link anme |
- Returns
- True if allowed to be in collision, otherwise false
◆ operator!=()
◆ operator=() [1/2]
◆ operator=() [2/2]
◆ operator==()
◆ removeAllowedCollision() [1/2]
| virtual void tesseract_common::AllowedCollisionMatrix::removeAllowedCollision |
( |
const std::string & |
link_name | ) |
|
|
inlinevirtual |
Remove disabled collision for any pair with link_name from allowed collision matrix.
- Parameters
-
| link_name | Collision object name |
◆ removeAllowedCollision() [2/2]
| virtual void tesseract_common::AllowedCollisionMatrix::removeAllowedCollision |
( |
const std::string & |
link_name1, |
|
|
const std::string & |
link_name2 |
|
) |
| |
|
inlinevirtual |
Remove disabled collision pair from allowed collision matrix.
- Parameters
-
| obj1 | Collision object name |
| obj2 | Collision object name |
◆ serialize()
template<class Archive >
| void tesseract_common::AllowedCollisionMatrix::serialize |
( |
Archive & |
ar, |
|
|
const unsigned int |
version |
|
) |
| |
|
private |
◆ boost::serialization::access
| friend class boost::serialization::access |
|
friend |
◆ operator<<
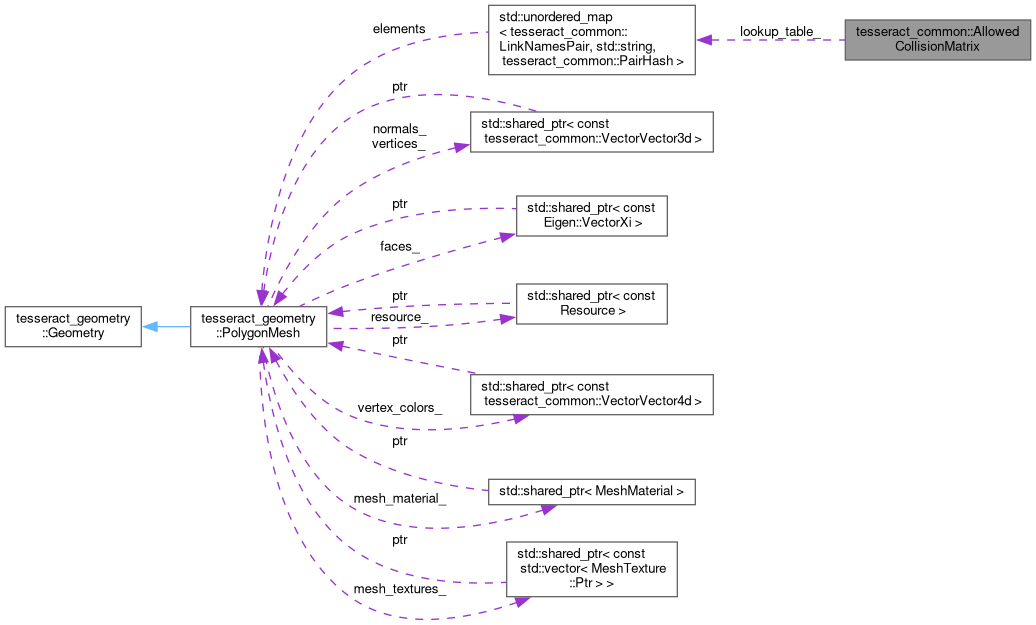
◆ lookup_table_
The documentation for this class was generated from the following files: