|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <contact_managers_plugin_factory.h>
Public Member Functions | |
| ContactManagersPluginFactory () | |
| ~ContactManagersPluginFactory () | |
| ContactManagersPluginFactory (const ContactManagersPluginFactory &)=default | |
| ContactManagersPluginFactory & | operator= (const ContactManagersPluginFactory &)=default |
| ContactManagersPluginFactory (ContactManagersPluginFactory &&)=default | |
| ContactManagersPluginFactory & | operator= (ContactManagersPluginFactory &&)=default |
| ContactManagersPluginFactory (YAML::Node config) | |
| Load plugins from yaml node. More... | |
| ContactManagersPluginFactory (const tesseract_common::fs::path &config) | |
| Load plugins from file path. More... | |
| ContactManagersPluginFactory (const std::string &config) | |
| Load plugins from string. More... | |
| void | addSearchPath (const std::string &path) |
| Add location for the plugin loader to search. More... | |
| std::set< std::string > | getSearchPaths () const |
| Get the plugin search paths. More... | |
| void | clearSearchPaths () |
| Clear the search paths. More... | |
| void | addSearchLibrary (const std::string &library_name) |
| Add a library to search for plugin name. More... | |
| std::set< std::string > | getSearchLibraries () const |
| Get the plugin search libraries. More... | |
| void | clearSearchLibraries () |
| Clean the search libraries. More... | |
| void | addDiscreteContactManagerPlugin (const std::string &name, tesseract_common::PluginInfo plugin_info) |
| Add a discrete contact manager plugin. More... | |
| bool | hasDiscreteContactManagerPlugins () const |
| Check if it has discrete contact manager plugins. More... | |
| tesseract_common::PluginInfoMap | getDiscreteContactManagerPlugins () const |
| Get the map of discrete contact manager plugin. More... | |
| void | removeDiscreteContactManagerPlugin (const std::string &name) |
| Remove discrete contact manager plugin. More... | |
| void | setDefaultDiscreteContactManagerPlugin (const std::string &name) |
| Set a default discrete contact manager. More... | |
| std::string | getDefaultDiscreteContactManagerPlugin () const |
| Get the default discrete contact manager. More... | |
| void | addContinuousContactManagerPlugin (const std::string &name, tesseract_common::PluginInfo plugin_info) |
| Add a continuous contact manager plugin. More... | |
| bool | hasContinuousContactManagerPlugins () const |
| Check if it has continuous contact manager plugins. More... | |
| tesseract_common::PluginInfoMap | getContinuousContactManagerPlugins () const |
| Get the map of continuous contact manager plugin. More... | |
| void | removeContinuousContactManagerPlugin (const std::string &name) |
| Remove continuous contact manager plugin. More... | |
| void | setDefaultContinuousContactManagerPlugin (const std::string &name) |
| Set a default continuous contact manager. More... | |
| std::string | getDefaultContinuousContactManagerPlugin () const |
| Get the default continuous contact manager. More... | |
| DiscreteContactManager::UPtr | createDiscreteContactManager (const std::string &name) const |
| Get discrete contact manager object given name. More... | |
| DiscreteContactManager::UPtr | createDiscreteContactManager (const std::string &name, const tesseract_common::PluginInfo &plugin_info) const |
| Get discrete contact manager object given plugin info. More... | |
| ContinuousContactManager::UPtr | createContinuousContactManager (const std::string &name) const |
| Get continuous contact manager object given name. More... | |
| ContinuousContactManager::UPtr | createContinuousContactManager (const std::string &name, const tesseract_common::PluginInfo &plugin_info) const |
| Get continuous contact manager object given plugin info. More... | |
| void | saveConfig (const boost::filesystem::path &file_path) const |
| Save the plugin information to a yaml config file. More... | |
| YAML::Node | getConfig () const |
| Get the plugin information config as a yaml node. More... | |
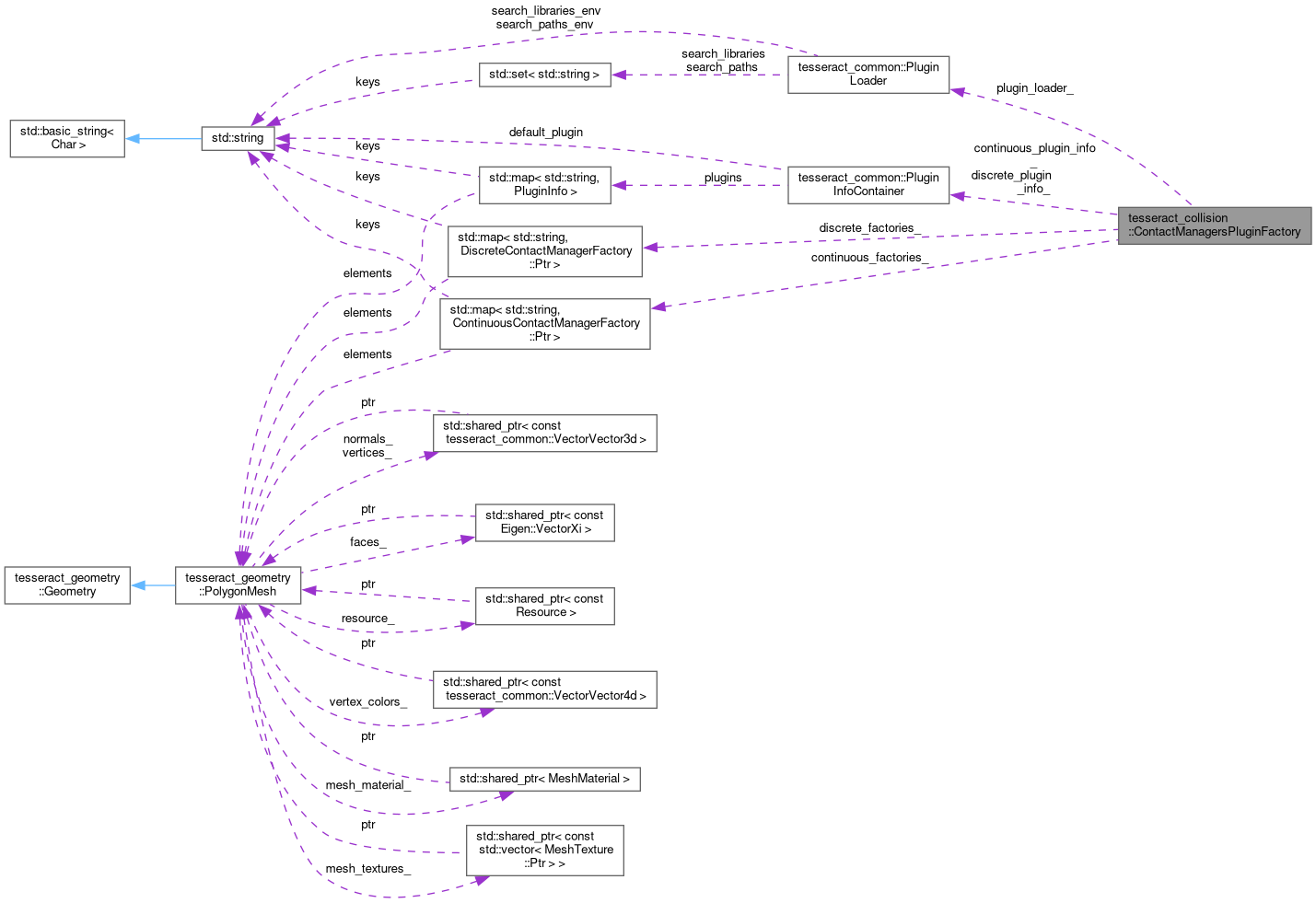
Private Attributes | |
| std::map< std::string, DiscreteContactManagerFactory::Ptr > | discrete_factories_ |
| std::map< std::string, ContinuousContactManagerFactory::Ptr > | continuous_factories_ |
| tesseract_common::PluginInfoContainer | discrete_plugin_info_ |
| tesseract_common::PluginInfoContainer | continuous_plugin_info_ |
| tesseract_common::PluginLoader | plugin_loader_ |
| tesseract_collision::ContactManagersPluginFactory::ContactManagersPluginFactory | ( | ) |
|
default |
|
default |
|
default |
| tesseract_collision::ContactManagersPluginFactory::ContactManagersPluginFactory | ( | YAML::Node | config | ) |
Load plugins from yaml node.
| config | The config node |
| tesseract_collision::ContactManagersPluginFactory::ContactManagersPluginFactory | ( | const tesseract_common::fs::path & | config | ) |
Load plugins from file path.
| config | The config file path |
| tesseract_collision::ContactManagersPluginFactory::ContactManagersPluginFactory | ( | const std::string & | config | ) |
Load plugins from string.
| config | The config string |
| void tesseract_collision::ContactManagersPluginFactory::addContinuousContactManagerPlugin | ( | const std::string & | name, |
| tesseract_common::PluginInfo | plugin_info | ||
| ) |
Add a continuous contact manager plugin.
| name | The name |
| plugin_info | The plugin information |
| void tesseract_collision::ContactManagersPluginFactory::addDiscreteContactManagerPlugin | ( | const std::string & | name, |
| tesseract_common::PluginInfo | plugin_info | ||
| ) |
Add a discrete contact manager plugin.
| name | The name |
| plugin_info | The plugin information |
| void tesseract_collision::ContactManagersPluginFactory::addSearchLibrary | ( | const std::string & | library_name | ) |
Add a library to search for plugin name.
| library_name | The library name without the prefix or suffix |
| void tesseract_collision::ContactManagersPluginFactory::addSearchPath | ( | const std::string & | path | ) |
Add location for the plugin loader to search.
| path | The full path to the directory |
| void tesseract_collision::ContactManagersPluginFactory::clearSearchLibraries | ( | ) |
Clean the search libraries.
| void tesseract_collision::ContactManagersPluginFactory::clearSearchPaths | ( | ) |
Clear the search paths.
| ContinuousContactManager::UPtr tesseract_collision::ContactManagersPluginFactory::createContinuousContactManager | ( | const std::string & | name | ) | const |
Get continuous contact manager object given name.
This looks for continuous contact manager plugin info. If not found nullptr is returned.
| name | The name |
| ContinuousContactManager::UPtr tesseract_collision::ContactManagersPluginFactory::createContinuousContactManager | ( | const std::string & | name, |
| const tesseract_common::PluginInfo & | plugin_info | ||
| ) | const |
Get continuous contact manager object given plugin info.
| name | The name |
| plugin_info | The plugin information to create kinematics object |
| DiscreteContactManager::UPtr tesseract_collision::ContactManagersPluginFactory::createDiscreteContactManager | ( | const std::string & | name | ) | const |
Get discrete contact manager object given name.
This looks for discrete contact manager plugin info. If not found nullptr is returned.
| name | The name |
| DiscreteContactManager::UPtr tesseract_collision::ContactManagersPluginFactory::createDiscreteContactManager | ( | const std::string & | name, |
| const tesseract_common::PluginInfo & | plugin_info | ||
| ) | const |
Get discrete contact manager object given plugin info.
| name | The name |
| plugin_info | The plugin information to create kinematics object |
| YAML::Node tesseract_collision::ContactManagersPluginFactory::getConfig | ( | ) | const |
Get the plugin information config as a yaml node.
| tesseract_common::PluginInfoMap tesseract_collision::ContactManagersPluginFactory::getContinuousContactManagerPlugins | ( | ) | const |
Get the map of continuous contact manager plugin.
| std::string tesseract_collision::ContactManagersPluginFactory::getDefaultContinuousContactManagerPlugin | ( | ) | const |
Get the default continuous contact manager.
| std::string tesseract_collision::ContactManagersPluginFactory::getDefaultDiscreteContactManagerPlugin | ( | ) | const |
Get the default discrete contact manager.
| tesseract_common::PluginInfoMap tesseract_collision::ContactManagersPluginFactory::getDiscreteContactManagerPlugins | ( | ) | const |
Get the map of discrete contact manager plugin.
| std::set< std::string > tesseract_collision::ContactManagersPluginFactory::getSearchLibraries | ( | ) | const |
Get the plugin search libraries.
| std::set< std::string > tesseract_collision::ContactManagersPluginFactory::getSearchPaths | ( | ) | const |
Get the plugin search paths.
| bool tesseract_collision::ContactManagersPluginFactory::hasContinuousContactManagerPlugins | ( | ) | const |
Check if it has continuous contact manager plugins.
| bool tesseract_collision::ContactManagersPluginFactory::hasDiscreteContactManagerPlugins | ( | ) | const |
Check if it has discrete contact manager plugins.
|
default |
|
default |
| void tesseract_collision::ContactManagersPluginFactory::removeContinuousContactManagerPlugin | ( | const std::string & | name | ) |
Remove continuous contact manager plugin.
| name | The name of the contact manager to remove |
| void tesseract_collision::ContactManagersPluginFactory::removeDiscreteContactManagerPlugin | ( | const std::string & | name | ) |
Remove discrete contact manager plugin.
| name | The name of the contact manager to remove |
| void tesseract_collision::ContactManagersPluginFactory::saveConfig | ( | const boost::filesystem::path & | file_path | ) | const |
Save the plugin information to a yaml config file.
| file_path | The file path |
| void tesseract_collision::ContactManagersPluginFactory::setDefaultContinuousContactManagerPlugin | ( | const std::string & | name | ) |
Set a default continuous contact manager.
| name | The name |
| void tesseract_collision::ContactManagersPluginFactory::setDefaultDiscreteContactManagerPlugin | ( | const std::string & | name | ) |
Set a default discrete contact manager.
| name | The name |
|
mutableprivate |
|
private |
|
mutableprivate |
|
private |
|
private |