|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Tesseract collision contact managers factory test. More...
#include <tesseract_common/macros.h>#include <gtest/gtest.h>#include <fstream>#include <tesseract_collision/core/contact_managers_plugin_factory.h>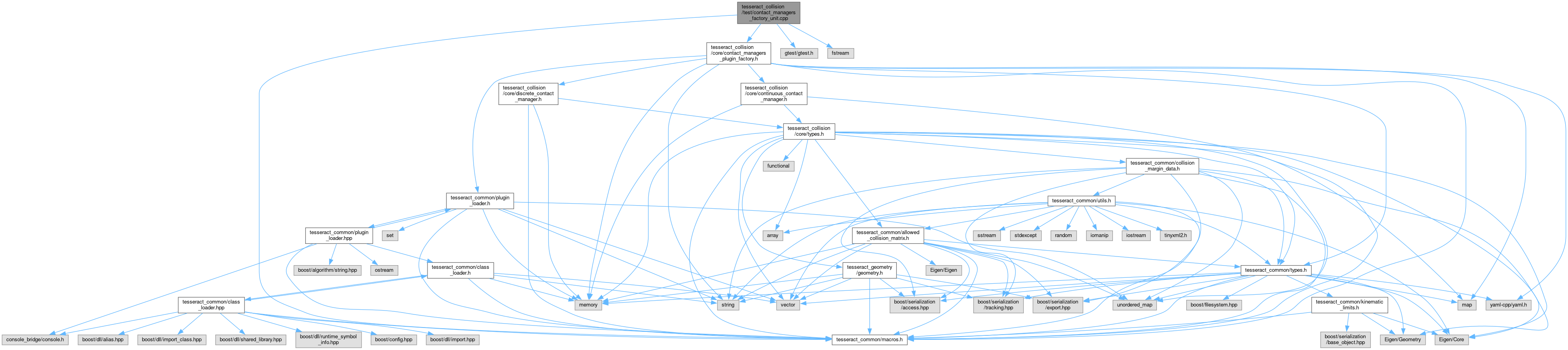
Functions | |
| void | runContactManagersFactoryTest (const tesseract_common::fs::path &config_path) |
| runContactManagersFactoryTest (config_path) | |
| runContactManagersFactoryTest (export_config_path) | |
| EXPECT_EQ (sp.size(), 2) | |
| for (auto it=search_paths.begin();it !=search_paths.end();++it) | |
| EXPECT_EQ (sl.size(), 2) | |
| EXPECT_EQ (discrete_plugins.size(), 3) | |
| EXPECT_EQ (continuous_plugins.size(), 2) | |
| EXPECT_FALSE (factory.getSearchPaths().empty()) | |
| EXPECT_EQ (factory.getSearchPaths().size(), 1) | |
| EXPECT_EQ (factory.getSearchLibraries().size(), 2) | |
| EXPECT_EQ (factory.getDiscreteContactManagerPlugins().size(), 0) | |
| EXPECT_ANY_THROW (factory.getDefaultDiscreteContactManagerPlugin()) | |
| EXPECT_FALSE (factory.hasDiscreteContactManagerPlugins()) | |
| factory | addSearchPath ("/usr/local/lib") |
| factory | addSearchLibrary ("tesseract_collision") |
| EXPECT_EQ (factory.getSearchLibraries().size(), 3) | |
| EXPECT_TRUE (map.find("NotFound")==map.end()) | |
| factory | addDiscreteContactManagerPlugin ("TestDiscreteManager", pi) |
| EXPECT_TRUE (factory.hasDiscreteContactManagerPlugins()) | |
| EXPECT_TRUE (map.find("TestDiscreteManager") !=map.end()) | |
| EXPECT_EQ (factory.getDefaultDiscreteContactManagerPlugin(), "TestDiscreteManager") | |
| factory | addDiscreteContactManagerPlugin ("Test2DiscreteManager", pi2) |
| EXPECT_TRUE (map.find("Test2DiscreteManager") !=map.end()) | |
| EXPECT_EQ (factory.getDefaultDiscreteContactManagerPlugin(), "Test2DiscreteManager") | |
| factory | setDefaultDiscreteContactManagerPlugin ("TestDiscreteManager") |
| factory | removeDiscreteContactManagerPlugin ("TestDiscreteManager") |
| EXPECT_ANY_THROW (factory.removeDiscreteContactManagerPlugin("DoesNotExist")) | |
| factory | addContinuousContactManagerPlugin ("TestContinuousManager", pi) |
| EXPECT_TRUE (map.find("TestContinuousManager") !=map.end()) | |
| EXPECT_EQ (factory.getDefaultContinuousContactManagerPlugin(), "TestContinuousManager") | |
| factory | addContinuousContactManagerPlugin ("Test2ContinuousManager", pi2) |
| EXPECT_TRUE (map.find("Test2ContinuousManager") !=map.end()) | |
| EXPECT_EQ (factory.getDefaultContinuousContactManagerPlugin(), "Test2ContinuousManager") | |
| factory | setDefaultContinuousContactManagerPlugin ("TestContinuousManager") |
| factory | removeContinuousContactManagerPlugin ("TestContinuousManager") |
| int | main (int argc, char **argv) |
Variables | |
| tesseract_common::fs::path | config_path = file_path.parent_path() / "contact_manager_plugins.yaml" |
| tesseract_common::fs::path | export_config_path |
| ContactManagersPluginFactory | factory (config) |
| YAML::Node | plugin_config = YAML::Load(config) |
| const YAML::Node & | plugin_info = plugin_config["contact_manager_plugins"] |
| const YAML::Node & | search_paths = plugin_info["search_paths"] |
| const YAML::Node & | search_libraries = plugin_info["search_libraries"] |
| const YAML::Node & | discrete_plugins = plugin_info["discrete_plugins"]["plugins"] |
| const YAML::Node & | continuous_plugins = plugin_info["continuous_plugins"]["plugins"] |
| tesseract_common::PluginInfo | pi |
| pi | class_name = "TestDiscreteManagerFactory" |
| map = factory.getDiscreteContactManagerPlugins() | |
| tesseract_common::PluginInfo | pi2 |
Tesseract collision contact managers factory test.
| factory addSearchLibrary | ( | "tesseract_collision" | ) |
| factory addSearchPath | ( | "/usr/local/lib" | ) |
| EXPECT_ANY_THROW | ( | factory. | getDefaultDiscreteContactManagerPlugin() | ) |
| EXPECT_ANY_THROW | ( | factory. | removeDiscreteContactManagerPlugin"DoesNotExist" | ) |
| EXPECT_EQ | ( | continuous_plugins. | size(), |
| 2 | |||
| ) |
| EXPECT_EQ | ( | discrete_plugins. | size(), |
| 3 | |||
| ) |
| EXPECT_EQ | ( | factory. | getDefaultContinuousContactManagerPlugin(), |
| "Test2ContinuousManager" | |||
| ) |
| EXPECT_EQ | ( | factory. | getDefaultContinuousContactManagerPlugin(), |
| "TestContinuousManager" | |||
| ) |
| EXPECT_EQ | ( | factory. | getDefaultDiscreteContactManagerPlugin(), |
| "Test2DiscreteManager" | |||
| ) |
| EXPECT_EQ | ( | factory. | getDefaultDiscreteContactManagerPlugin(), |
| "TestDiscreteManager" | |||
| ) |
| EXPECT_EQ | ( | factory. | getDiscreteContactManagerPlugins).size(, |
| 0 | |||
| ) |
| EXPECT_EQ | ( | factory. | getSearchLibraries).size(, |
| 2 | |||
| ) |
| EXPECT_EQ | ( | factory. | getSearchLibraries).size(, |
| 3 | |||
| ) |
| EXPECT_EQ | ( | factory. | getSearchPaths).size(, |
| 1 | |||
| ) |
| EXPECT_EQ | ( | sl. | size(), |
| 2 | |||
| ) |
| EXPECT_EQ | ( | sp. | size(), |
| 2 | |||
| ) |
| EXPECT_FALSE | ( | factory. | getSearchPaths).empty( | ) |
| EXPECT_FALSE | ( | factory. | hasDiscreteContactManagerPlugins() | ) |
| EXPECT_TRUE | ( | factory. | hasDiscreteContactManagerPlugins() | ) |
| EXPECT_TRUE | ( | map. | find"NotFound" = =map.end() | ) |
| EXPECT_TRUE | ( | map.find("Test2ContinuousManager") ! | = map.end() | ) |
| EXPECT_TRUE | ( | map.find("Test2DiscreteManager") ! | = map.end() | ) |
| EXPECT_TRUE | ( | map.find("TestContinuousManager") ! | = map.end() | ) |
| EXPECT_TRUE | ( | map.find("TestDiscreteManager") ! | = map.end() | ) |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| factory removeContinuousContactManagerPlugin | ( | "TestContinuousManager" | ) |
| factory removeDiscreteContactManagerPlugin | ( | "TestDiscreteManager" | ) |
| runContactManagersFactoryTest | ( | config_path | ) |
| void runContactManagersFactoryTest | ( | const tesseract_common::fs::path & | config_path | ) |
| runContactManagersFactoryTest | ( | export_config_path | ) |
| factory setDefaultContinuousContactManagerPlugin | ( | "TestContinuousManager" | ) |
| factory setDefaultDiscreteContactManagerPlugin | ( | "TestDiscreteManager" | ) |
| pi2 class_name = "TestDiscreteManagerFactory" |
| tesseract_common::fs::path config_path = file_path.parent_path() / "contact_manager_plugins.yaml" |
| const YAML::Node & continuous_plugins = plugin_info["continuous_plugins"]["plugins"] |
| const YAML::Node & discrete_plugins = plugin_info["discrete_plugins"]["plugins"] |
| tesseract_common::fs::path export_config_path |
| ContactManagersPluginFactory factory(config) | ( | config | ) |
| map = factory.getDiscreteContactManagerPlugins() |
| YAML::Node plugin_config = YAML::Load(config) |
| const YAML::Node & plugin_info = plugin_config["contact_manager_plugins"] |
| const YAML::Node & search_libraries = plugin_info["search_libraries"] |
| const YAML::Node & search_paths = plugin_info["search_paths"] |