|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Directories | |
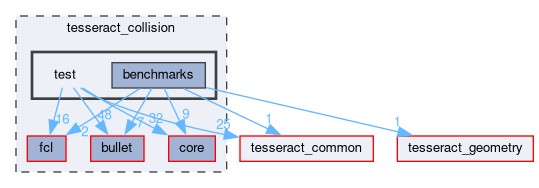
| directory | benchmarks |
Files | |
| file | collision_box_box_cast_unit.cpp |
| file | collision_box_box_unit.cpp |
| file | collision_box_capsule_unit.cpp |
| file | collision_box_cone_unit.cpp |
| file | collision_box_cylinder_unit.cpp |
| file | collision_box_sphere_unit.cpp |
| file | collision_clone_unit.cpp |
| file | collision_compound_compound_unit.cpp |
| file | collision_core_unit.cpp |
| file | collision_large_dataset_unit.cpp |
| file | collision_margin_data_unit.cpp |
| file | collision_mesh_mesh_unit.cpp |
| file | collision_multi_threaded_unit.cpp |
| file | collision_octomap_mesh_unit.cpp |
| file | collision_octomap_octomap_unit.cpp |
| file | collision_octomap_sphere_unit.cpp |
| file | collision_sphere_sphere_cast_unit.cpp |
| file | collision_sphere_sphere_unit.cpp |
| file | contact_managers_config_unit.cpp |
| Tesseract collision contact managers config test. | |
| file | contact_managers_factory_static_unit.cpp |
| file | contact_managers_factory_unit.cpp |
| Tesseract collision contact managers factory test. | |
| file | convex_concave_unit.cpp |