|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <gtest/gtest.h>#include <numeric>#include <tesseract_collision/core/types.h>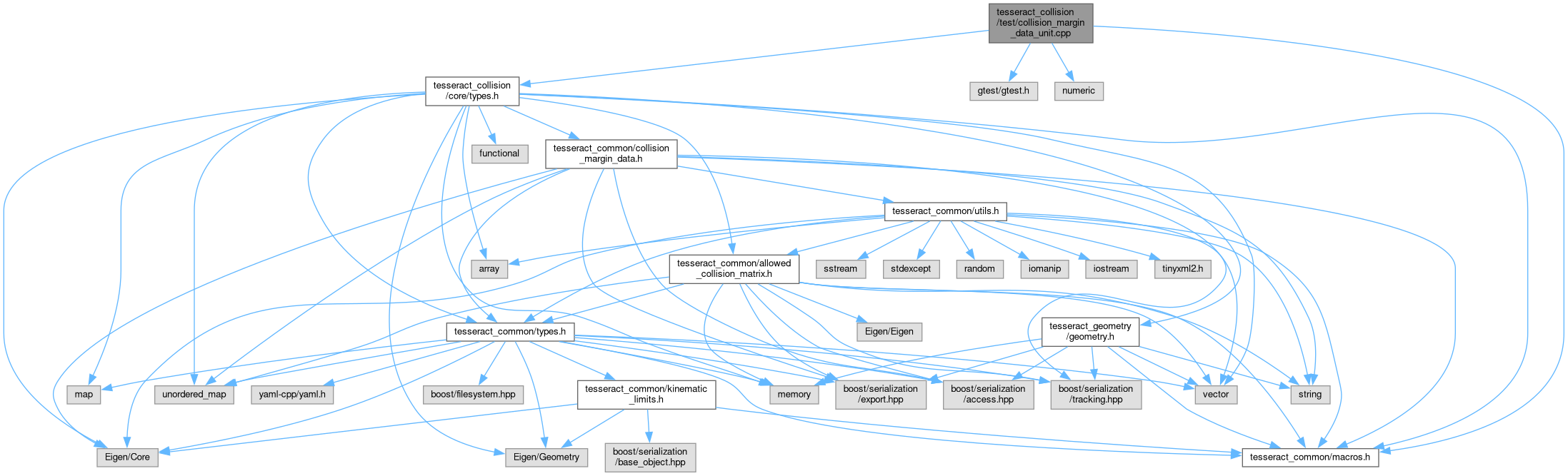
Functions | |
| EXPECT_NEAR (data.getDefaultCollisionMargin(), 0, tol) | |
| EXPECT_NEAR (data.getPairCollisionMargin("link_1", "link_2"), 0, tol) | |
| EXPECT_EQ (data.getPairCollisionMargins().size(), 0) | |
| EXPECT_NEAR (data.getDefaultCollisionMargin(), default_margin, tol) | |
| EXPECT_NEAR (data.getPairCollisionMargin("link_1", "link_2"), default_margin, tol) | |
| data | setDefaultCollisionMargin (default_margin) |
| data | setPairCollisionMargin ("link_1", "link_2", pair_margin) |
| EXPECT_NEAR (data.getMaxCollisionMargin(), pair_margin, tol) | |
| EXPECT_NEAR (data.getPairCollisionMargin("link_1", "link_2"), pair_margin, tol) | |
| EXPECT_EQ (data.getPairCollisionMargins().size(), 1) | |
| data | setPairCollisionMargin ("link_1", "link_2", default_margin) |
| data | incrementMargins (increment) |
| EXPECT_NEAR (data.getDefaultCollisionMargin(), default_margin+increment, tol) | |
| EXPECT_NEAR (data.getMaxCollisionMargin(), pair_margin+increment, tol) | |
| EXPECT_NEAR (data.getPairCollisionMargin("link_1", "link_2"), pair_margin+increment, tol) | |
| data | scaleMargins (scale) |
| EXPECT_NEAR (data.getDefaultCollisionMargin(), default_margin *scale, tol) | |
| EXPECT_NEAR (data.getMaxCollisionMargin(), pair_margin *scale, tol) | |
| EXPECT_NEAR (data.getPairCollisionMargin("link_1", "link_2"), pair_margin *scale, tol) | |
| data | apply (override_data, CollisionMarginOverrideType::OVERRIDE_DEFAULT_MARGIN) |
| CollisionMarginData | override_data (default_margin *3) |
| data | apply (override_data, CollisionMarginOverrideType::OVERRIDE_PAIR_MARGIN) |
| data | apply (override_data, CollisionMarginOverrideType::REPLACE) |
| override_data | setPairCollisionMargin ("link_1", "link_2", pair_margin *3) |
| data | apply (override_data, CollisionMarginOverrideType::NONE) |
| override_data | setPairCollisionMargin ("link_1", "link_3", pair_margin *3) |
| data | apply (override_data, CollisionMarginOverrideType::MODIFY) |
| EXPECT_NEAR (data.getPairCollisionMargin("link_1", "link_3"), pair_margin *3, tol) | |
| EXPECT_EQ (data.getPairCollisionMargins().size(), 2) | |
| data | apply (override_data, CollisionMarginOverrideType::MODIFY_PAIR_MARGIN) |
| int | main (int argc, char **argv) |
Variables | |
| CollisionMarginData | data (default_margin) |
| double | pair_margin = 0.5 |
| default_margin = 2 * pair_margin | |
| double | increment = 0.01 |
| double | scale = 1.5 |
| CollisionMarginData | override_data (default_margin) |
| data apply | ( | override_data | , |
| CollisionMarginOverrideType::MODIFY | |||
| ) |
| data apply | ( | override_data | , |
| CollisionMarginOverrideType::MODIFY_PAIR_MARGIN | |||
| ) |
| data apply | ( | override_data | , |
| CollisionMarginOverrideType::NONE | |||
| ) |
| data apply | ( | override_data | , |
| CollisionMarginOverrideType::OVERRIDE_DEFAULT_MARGIN | |||
| ) |
| data apply | ( | override_data | , |
| CollisionMarginOverrideType::OVERRIDE_PAIR_MARGIN | |||
| ) |
| data apply | ( | override_data | , |
| CollisionMarginOverrideType::REPLACE | |||
| ) |
| EXPECT_EQ | ( | data. | getPairCollisionMargins).size(, |
| 0 | |||
| ) |
| EXPECT_EQ | ( | data. | getPairCollisionMargins).size(, |
| 1 | |||
| ) |
| EXPECT_EQ | ( | data. | getPairCollisionMargins).size(, |
| 2 | |||
| ) |
| EXPECT_NEAR | ( | data. | getDefaultCollisionMargin(), |
| 0 | , | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getDefaultCollisionMargin(), |
| default_margin * | scale, | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getDefaultCollisionMargin(), |
| default_margin+ | increment, | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getDefaultCollisionMargin(), |
| default_margin | , | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getMaxCollisionMargin(), |
| pair_margin * | scale, | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getMaxCollisionMargin(), |
| pair_margin+ | increment, | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getMaxCollisionMargin(), |
| pair_margin | , | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getPairCollisionMargin"link_1", "link_2", |
| 0 | , | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getPairCollisionMargin"link_1", "link_2", |
| default_margin | , | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getPairCollisionMargin"link_1", "link_2", |
| pair_margin * | scale, | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getPairCollisionMargin"link_1", "link_2", |
| pair_margin+ | increment, | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getPairCollisionMargin"link_1", "link_2", |
| pair_margin | , | ||
| tol | |||
| ) |
| EXPECT_NEAR | ( | data. | getPairCollisionMargin"link_1", "link_3", |
| pair_margin * | 3, | ||
| tol | |||
| ) |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| CollisionMarginData override_data | ( | default_margin * | 3 | ) |
| data setDefaultCollisionMargin | ( | default_margin | ) |
| data setPairCollisionMargin | ( | "link_1" | , |
| "link_2" | , | ||
| default_margin | |||
| ) |
| override_data setPairCollisionMargin | ( | "link_1" | , |
| "link_2" | , | ||
| pair_margin * | 3 | ||
| ) |
| override_data setPairCollisionMargin | ( | "link_1" | , |
| "link_2" | , | ||
| pair_margin | |||
| ) |
| override_data setPairCollisionMargin | ( | "link_1" | , |
| "link_3" | , | ||
| pair_margin * | 3 | ||
| ) |
| CollisionMarginData data | ( | default_margin | ) |
| default_margin = 2 * pair_margin |
| double increment = 0.01 |
| CollisionMarginData override_data | ( | default_margin | ) |
| double pair_margin = 0.5 |
| double scale = 1.5 |