|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <gtest/gtest.h>#include "tesseract_collision/bullet/bullet_contact_checker.h"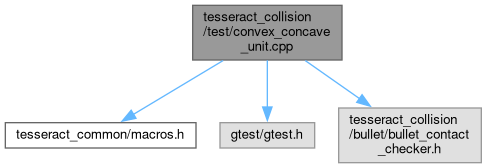
Functions | |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH TESSERACT_COMMON_IGNORE_WARNINGS_POP | TEST (TesseractConvexConcaveUnit, ConvexConcaveUnit) |
| int | main (int argc, char **argv) |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH TESSERACT_COMMON_IGNORE_WARNINGS_POP TEST | ( | TesseractConvexConcaveUnit | , |
| ConvexConcaveUnit | |||
| ) |