|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <kinematic_group.h>
Public Types | |
| using | Ptr = std::shared_ptr< KinematicGroup > |
| using | ConstPtr = std::shared_ptr< const KinematicGroup > |
| using | UPtr = std::unique_ptr< KinematicGroup > |
| using | ConstUPtr = std::unique_ptr< const KinematicGroup > |
 Public Types inherited from tesseract_kinematics::JointGroup Public Types inherited from tesseract_kinematics::JointGroup | |
| using | Ptr = std::shared_ptr< JointGroup > |
| using | ConstPtr = std::shared_ptr< const JointGroup > |
| using | UPtr = std::unique_ptr< JointGroup > |
| using | ConstUPtr = std::unique_ptr< const JointGroup > |
Public Member Functions | |
| ~KinematicGroup () override=default | |
| KinematicGroup (const KinematicGroup &other) | |
| KinematicGroup & | operator= (const KinematicGroup &other) |
| KinematicGroup (KinematicGroup &&)=default | |
| KinematicGroup & | operator= (KinematicGroup &&)=default |
| KinematicGroup (std::string name, std::vector< std::string > joint_names, InverseKinematics::UPtr inv_kin, const tesseract_scene_graph::SceneGraph &scene_graph, const tesseract_scene_graph::SceneState &scene_state) | |
| Create a kinematics group with inverse kinematics. More... | |
| IKSolutions | calcInvKin (const KinGroupIKInputs &tip_link_poses, const Eigen::Ref< const Eigen::VectorXd > &seed) const |
| Calculates joint solutions given a pose. More... | |
| IKSolutions | calcInvKin (const KinGroupIKInput &tip_link_pose, const Eigen::Ref< const Eigen::VectorXd > &seed) const |
| Calculates joint solutions given a pose. More... | |
| std::vector< std::string > | getAllValidWorkingFrames () const |
| Returns all possible working frames in which goal poses can be defined. More... | |
| std::vector< std::string > | getAllPossibleTipLinkNames () const |
| Get the tip link name. More... | |
| Public Member Functions inherited from tesseract_kinematics::JointGroup | |
| virtual | ~JointGroup ()=default |
| JointGroup (const JointGroup &other) | |
| JointGroup & | operator= (const JointGroup &other) |
| JointGroup (JointGroup &&)=default | |
| JointGroup & | operator= (JointGroup &&)=default |
| JointGroup (std::string name, std::vector< std::string > joint_names, const tesseract_scene_graph::SceneGraph &scene_graph, const tesseract_scene_graph::SceneState &scene_state) | |
| Create a kinematics group without inverse kinematics for the provided joint names. More... | |
| tesseract_common::TransformMap | calcFwdKin (const Eigen::Ref< const Eigen::VectorXd > &joint_angles) const |
| Calculates tool pose of robot chain. More... | |
| Eigen::MatrixXd | calcJacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_angles, const std::string &link_name) const |
| Calculated jacobian of robot given joint angles. More... | |
| Eigen::MatrixXd | calcJacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_angles, const std::string &link_name, const Eigen::Vector3d &link_point) const |
| Calculated jacobian of robot given joint angles. More... | |
| Eigen::MatrixXd | calcJacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_angles, const std::string &base_link_name, const std::string &link_name) const |
| Calculated jacobian of robot given joint angles. More... | |
| Eigen::MatrixXd | calcJacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_angles, const std::string &base_link_name, const std::string &link_name, const Eigen::Vector3d &link_point) const |
| Calculated jacobian of robot given joint angles. More... | |
| std::vector< std::string > | getJointNames () const |
| Get list of joint names for kinematic object. More... | |
| std::vector< std::string > | getLinkNames () const |
| Get list of all link names (with and without geometry) for kinematic object. More... | |
| std::vector< std::string > | getActiveLinkNames () const |
| Get list of active link names (with and without geometry) for kinematic object. More... | |
| std::vector< std::string > | getStaticLinkNames () const |
| Get list of static link names (with and without geometry) for kinematic object. More... | |
| bool | isActiveLinkName (const std::string &link_name) const |
| Check if link is an active link. More... | |
| bool | hasLinkName (const std::string &link_name) const |
| Check if link name exists. More... | |
| tesseract_common::KinematicLimits | getLimits () const |
| Get the kinematic limits (joint, velocity, acceleration, etc.) More... | |
| void | setLimits (const tesseract_common::KinematicLimits &limits) |
| Setter for kinematic limits (joint, velocity, acceleration, etc.) More... | |
| std::vector< Eigen::Index > | getRedundancyCapableJointIndices () const |
| Get vector indicating which joints are capable of producing redundant solutions. More... | |
| Eigen::Index | numJoints () const |
| Number of joints in robot. More... | |
| std::string | getBaseLinkName () const |
| Get the robot base link name. More... | |
| std::string | getName () const |
| Name of the manipulator. More... | |
| bool | checkJoints (const Eigen::Ref< const Eigen::VectorXd > &vec) const |
| Check for consistency in # and limits of joints. More... | |
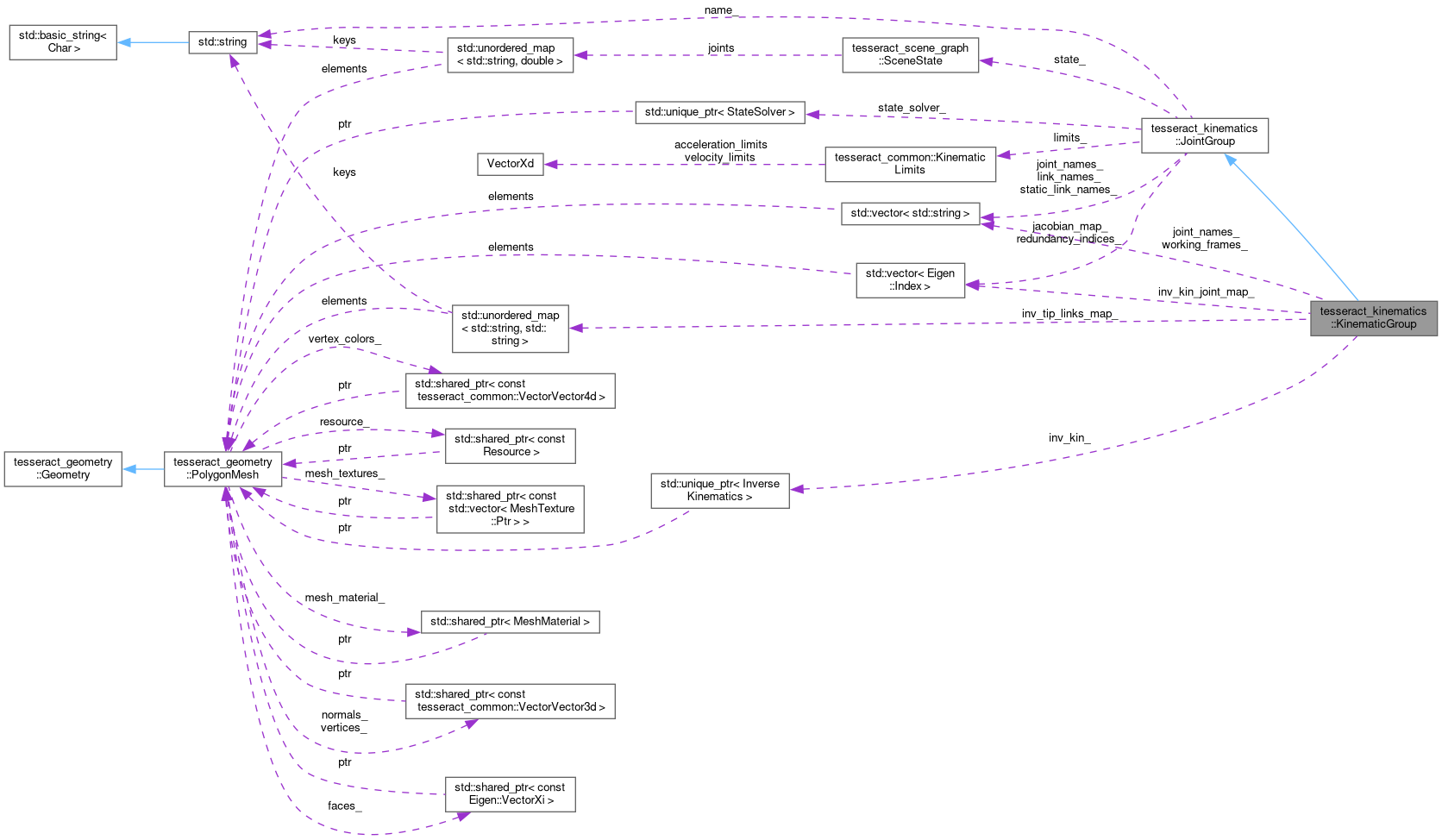
Private Attributes | |
| std::vector< std::string > | joint_names_ |
| bool | reorder_required_ { false } |
| std::vector< Eigen::Index > | inv_kin_joint_map_ |
| InverseKinematics::UPtr | inv_kin_ |
| Eigen::Isometry3d | inv_to_fwd_base_ { Eigen::Isometry3d::Identity() } |
| std::vector< std::string > | working_frames_ |
| std::unordered_map< std::string, std::string > | inv_tip_links_map_ |
Additional Inherited Members | |
| Protected Attributes inherited from tesseract_kinematics::JointGroup | |
| std::string | name_ |
| tesseract_scene_graph::SceneState | state_ |
| tesseract_scene_graph::StateSolver::UPtr | state_solver_ |
| std::vector< std::string > | joint_names_ |
| std::vector< std::string > | link_names_ |
| std::vector< std::string > | static_link_names_ |
| tesseract_common::TransformMap | static_link_transforms_ |
| tesseract_common::KinematicLimits | limits_ |
| std::vector< Eigen::Index > | redundancy_indices_ |
| std::vector< Eigen::Index > | jacobian_map_ |
| using tesseract_kinematics::KinematicGroup::ConstPtr = std::shared_ptr<const KinematicGroup> |
| using tesseract_kinematics::KinematicGroup::ConstUPtr = std::unique_ptr<const KinematicGroup> |
| using tesseract_kinematics::KinematicGroup::Ptr = std::shared_ptr<KinematicGroup> |
| using tesseract_kinematics::KinematicGroup::UPtr = std::unique_ptr<KinematicGroup> |
|
overridedefault |
| tesseract_kinematics::KinematicGroup::KinematicGroup | ( | const KinematicGroup & | other | ) |
|
default |
| tesseract_kinematics::KinematicGroup::KinematicGroup | ( | std::string | name, |
| std::vector< std::string > | joint_names, | ||
| InverseKinematics::UPtr | inv_kin, | ||
| const tesseract_scene_graph::SceneGraph & | scene_graph, | ||
| const tesseract_scene_graph::SceneState & | scene_state | ||
| ) |
Create a kinematics group with inverse kinematics.
| name | The name of the kinematic group |
| inv_kin | The inverse kinematics object to create kinematic group from |
| scene_graph | The scene graph |
| scene_state | The scene state |
| IKSolutions tesseract_kinematics::KinematicGroup::calcInvKin | ( | const KinGroupIKInput & | tip_link_pose, |
| const Eigen::Ref< const Eigen::VectorXd > & | seed | ||
| ) | const |
Calculates joint solutions given a pose.
If redundant solutions are needed see utility function getRedundantSolutions.
| tip_link_pose | The input information to solve inverse kinematics for. This is a convenience function for when only one tip link exists |
| seed | Vector of seed joint angles (size must match number of joints in robot chain) |
| IKSolutions tesseract_kinematics::KinematicGroup::calcInvKin | ( | const KinGroupIKInputs & | tip_link_poses, |
| const Eigen::Ref< const Eigen::VectorXd > & | seed | ||
| ) | const |
Calculates joint solutions given a pose.
If redundant solutions are needed see utility function getRedundantSolutions.
| tip_link_poses | The input information to solve inverse kinematics for. There must be an input for each link provided in getTipLinkNames |
| seed | Vector of seed joint angles (size must match number of joints in robot chain) |
| std::vector< std::string > tesseract_kinematics::KinematicGroup::getAllPossibleTipLinkNames | ( | ) | const |
Get the tip link name.
The inverse kinematics solver requires that all poses be solved for a set of tip link frames that terminate a kinematic chain or tree. In the case of some closed-form IK solvers, this tip link must the tool flange of the robot rather than another preferred link. If the desired tip link is a statically connected child of the required IK solver tip link, then the target IK pose can be transformed into a target pose for the IK solver tip link. This function identifies all possible tip links that can be used for IK (i.e. static child links of the IK solver tip link(s)) and internally performs the appropriate transformations when solving IK
| std::vector< std::string > tesseract_kinematics::KinematicGroup::getAllValidWorkingFrames | ( | ) | const |
Returns all possible working frames in which goal poses can be defined.
The inverse kinematics solver requires that all poses be defined relative to a single working frame. However if this working frame is static, a pose can be defined in another static frame in the environment and transformed into the IK solver working frame. Similarly if the working frame is an active link (e.g. attached to a part positioner), a target pose can also be defined relative to any child link of the working frame and transformed into the IK solver working frame. This function identifies all of these other possible working frames and performs the appropriate transformations internally when solving IK.
| KinematicGroup & tesseract_kinematics::KinematicGroup::operator= | ( | const KinematicGroup & | other | ) |
|
default |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |