|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <state_solver.h>
Public Types | |
| using | Ptr = std::shared_ptr< StateSolver > |
| using | ConstPtr = std::shared_ptr< const StateSolver > |
| using | UPtr = std::unique_ptr< StateSolver > |
| using | ConstUPtr = std::unique_ptr< const StateSolver > |
Public Member Functions | |
| StateSolver ()=default | |
| virtual | ~StateSolver ()=default |
| StateSolver (const StateSolver &)=default | |
| StateSolver & | operator= (const StateSolver &)=default |
| StateSolver (StateSolver &&)=default | |
| StateSolver & | operator= (StateSolver &&)=default |
| virtual StateSolver::UPtr | clone () const =0 |
| This should clone the object so it may be used in a multi threaded application where each thread would clone the solver. More... | |
| virtual void | setState (const Eigen::Ref< const Eigen::VectorXd > &joint_values)=0 |
| Set the current state of the solver. More... | |
| virtual void | setState (const std::unordered_map< std::string, double > &joint_values)=0 |
| Set the current state of the solver. More... | |
| virtual void | setState (const std::vector< std::string > &joint_names, const Eigen::Ref< const Eigen::VectorXd > &joint_values)=0 |
| virtual SceneState | getState (const Eigen::Ref< const Eigen::VectorXd > &joint_values) const =0 |
| Get the state of the solver given the joint values. More... | |
| virtual SceneState | getState (const std::unordered_map< std::string, double > &joint_values) const =0 |
| Get the state of the scene for a given set or subset of joint values. More... | |
| virtual SceneState | getState (const std::vector< std::string > &joint_names, const Eigen::Ref< const Eigen::VectorXd > &joint_values) const =0 |
| virtual SceneState | getState () const =0 |
| Get the current state of the scene. More... | |
| virtual Eigen::MatrixXd | getJacobian (const Eigen::Ref< const Eigen::VectorXd > &joint_values, const std::string &link_name) const =0 |
| Get the jacobian of the solver given the joint values. More... | |
| virtual Eigen::MatrixXd | getJacobian (const std::unordered_map< std::string, double > &joint_values, const std::string &link_name) const =0 |
| Get the jacobian of the scene for a given set or subset of joint values. More... | |
| virtual Eigen::MatrixXd | getJacobian (const std::vector< std::string > &joint_names, const Eigen::Ref< const Eigen::VectorXd > &joint_values, const std::string &link_name) const =0 |
| virtual SceneState | getRandomState () const =0 |
| Get the random state of the environment. More... | |
| virtual std::vector< std::string > | getJointNames () const =0 |
| Get the vector of joint names. More... | |
| virtual std::vector< std::string > | getActiveJointNames () const =0 |
| Get the vector of joint names which align with the limits. More... | |
| virtual std::string | getBaseLinkName () const =0 |
| Get the base link name. More... | |
| virtual std::vector< std::string > | getLinkNames () const =0 |
| Get the vector of link names. More... | |
| virtual std::vector< std::string > | getActiveLinkNames () const =0 |
| Get the vector of active link names. More... | |
| virtual std::vector< std::string > | getStaticLinkNames () const =0 |
| Get a vector of static link names in the environment. More... | |
| virtual bool | isActiveLinkName (const std::string &link_name) const =0 |
| Check if link is an active link. More... | |
| virtual bool | hasLinkName (const std::string &link_name) const =0 |
| Check if link name exists. More... | |
| virtual tesseract_common::VectorIsometry3d | getLinkTransforms () const =0 |
| Get all of the links transforms. More... | |
| virtual Eigen::Isometry3d | getLinkTransform (const std::string &link_name) const =0 |
| Get the transform corresponding to the link. More... | |
| virtual Eigen::Isometry3d | getRelativeLinkTransform (const std::string &from_link_name, const std::string &to_link_name) const =0 |
| Get transform between two links using the current state. More... | |
| virtual tesseract_common::KinematicLimits | getLimits () const =0 |
| Getter for kinematic limits. More... | |
| using tesseract_scene_graph::StateSolver::ConstPtr = std::shared_ptr<const StateSolver> |
| using tesseract_scene_graph::StateSolver::ConstUPtr = std::unique_ptr<const StateSolver> |
| using tesseract_scene_graph::StateSolver::Ptr = std::shared_ptr<StateSolver> |
| using tesseract_scene_graph::StateSolver::UPtr = std::unique_ptr<StateSolver> |
|
default |
|
virtualdefault |
|
default |
|
default |
|
pure virtual |
This should clone the object so it may be used in a multi threaded application where each thread would clone the solver.
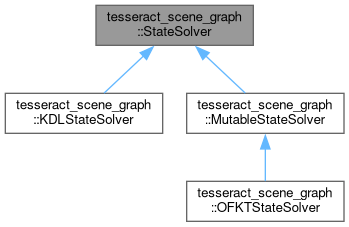
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the vector of joint names which align with the limits.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the vector of active link names.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the base link name.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the jacobian of the solver given the joint values.
This must be the same size and order as what is returned by getJointNames
| joint_values | The joint values |
| link_name | The link name to calculate the jacobian |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the jacobian of the scene for a given set or subset of joint values.
This does not change the internal state of the solver.
| joints | A map of joint names to joint values to change. |
| link_name | The link name to calculate the jacobian |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the vector of joint names.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Getter for kinematic limits.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the vector of link names.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the transform corresponding to the link.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get all of the links transforms.
Order should be the same as getLinkNames()
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the random state of the environment.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get transform between two links using the current state.
| from_link_name | The link name the transform should be relative to |
| to_link_name | The link name to get transform |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the current state of the scene.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the state of the solver given the joint values.
This must be the same size and order as what is returned by getJointNames
| joint_values | The joint values |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get the state of the scene for a given set or subset of joint values.
This does not change the internal state of the solver.
| joints | A map of joint names to joint values to change. |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Get a vector of static link names in the environment.
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Check if link name exists.
| link_name | The link name to check for |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Check if link is an active link.
| link_name | The link name to check |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
default |
|
default |
|
pure virtual |
Set the current state of the solver.
This must be the same size and order as what is returned by getJointNames
| joint_values | The joint values |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Set the current state of the solver.
After updating the current state these function must call currentStateChanged() which will update the contact managers transforms
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.
|
pure virtual |
Implemented in tesseract_scene_graph::KDLStateSolver, and tesseract_scene_graph::OFKTStateSolver.