|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
This holds a state of the scene. More...
#include <scene_state.h>
Public Types | |
| using | Ptr = std::shared_ptr< SceneState > |
| using | ConstPtr = std::shared_ptr< const SceneState > |
| using | UPtr = std::unique_ptr< SceneState > |
| using | ConstUPtr = std::unique_ptr< const SceneState > |
Public Member Functions | |
| Eigen::VectorXd | getJointValues (const std::vector< std::string > &joint_names) const |
| bool | operator== (const SceneState &rhs) const |
| bool | operator!= (const SceneState &rhs) const |
Public Attributes | |
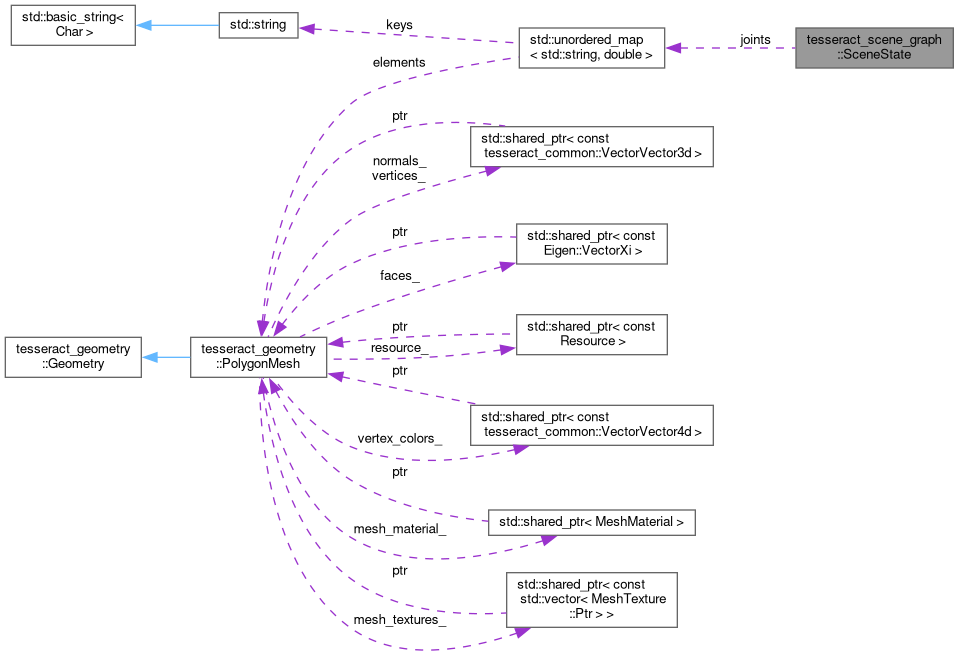
| std::unordered_map< std::string, double > | joints |
| The joint values used for calculating the joint and link transforms. More... | |
| tesseract_common::TransformMap | link_transforms |
| The link transforms in world coordinate system. More... | |
| tesseract_common::TransformMap | joint_transforms |
| The joint transforms in world coordinate system. More... | |
Private Member Functions | |
| template<class Archive > | |
| void | serialize (Archive &ar, const unsigned int version) |
Friends | |
| class | boost::serialization::access |
This holds a state of the scene.
It provides a way to look up the location of a link/joint in world coordinates system by link/joint name. It is possible to get the joint transform using the child link transform of the joint, but they are both provided for convenience. Also the joint values used to calculated the link/joint transforms is provided.
| using tesseract_scene_graph::SceneState::ConstPtr = std::shared_ptr<const SceneState> |
| using tesseract_scene_graph::SceneState::ConstUPtr = std::unique_ptr<const SceneState> |
| using tesseract_scene_graph::SceneState::Ptr = std::shared_ptr<SceneState> |
| using tesseract_scene_graph::SceneState::UPtr = std::unique_ptr<SceneState> |
| Eigen::VectorXd tesseract_scene_graph::SceneState::getJointValues | ( | const std::vector< std::string > & | joint_names | ) | const |
| bool tesseract_scene_graph::SceneState::operator!= | ( | const SceneState & | rhs | ) | const |
| bool tesseract_scene_graph::SceneState::operator== | ( | const SceneState & | rhs | ) | const |
|
private |
|
friend |
| tesseract_common::TransformMap tesseract_scene_graph::SceneState::joint_transforms |
The joint transforms in world coordinate system.
| std::unordered_map<std::string, double> tesseract_scene_graph::SceneState::joints |
The joint values used for calculating the joint and link transforms.
| tesseract_common::TransformMap tesseract_scene_graph::SceneState::link_transforms |
The link transforms in world coordinate system.