The BroadphaseContactResultCallback is used to report contact points.
More...
#include <bullet_utils.h>
The BroadphaseContactResultCallback is used to report contact points.
◆ BroadphaseContactResultCallback() [1/3]
| tesseract_collision::tesseract_collision_bullet::BroadphaseContactResultCallback::BroadphaseContactResultCallback |
( |
ContactTestData & |
collisions, |
|
|
double |
contact_distance, |
|
|
bool |
verbose = false |
|
) |
| |
◆ ~BroadphaseContactResultCallback()
| virtual tesseract_collision::tesseract_collision_bullet::BroadphaseContactResultCallback::~BroadphaseContactResultCallback |
( |
| ) |
|
|
virtualdefault |
◆ BroadphaseContactResultCallback() [2/3]
| tesseract_collision::tesseract_collision_bullet::BroadphaseContactResultCallback::BroadphaseContactResultCallback |
( |
const BroadphaseContactResultCallback & |
| ) |
|
|
default |
◆ BroadphaseContactResultCallback() [3/3]
◆ addSingleResult()
| virtual btScalar tesseract_collision::tesseract_collision_bullet::BroadphaseContactResultCallback::addSingleResult |
( |
btManifoldPoint & |
cp, |
|
|
const btCollisionObjectWrapper * |
colObj0Wrap, |
|
|
int |
partId0, |
|
|
int |
index0, |
|
|
const btCollisionObjectWrapper * |
colObj1Wrap, |
|
|
int |
partId1, |
|
|
int |
index1 |
|
) |
| |
|
pure virtual |
◆ needsCollision()
◆ operator=() [1/2]
◆ operator=() [2/2]
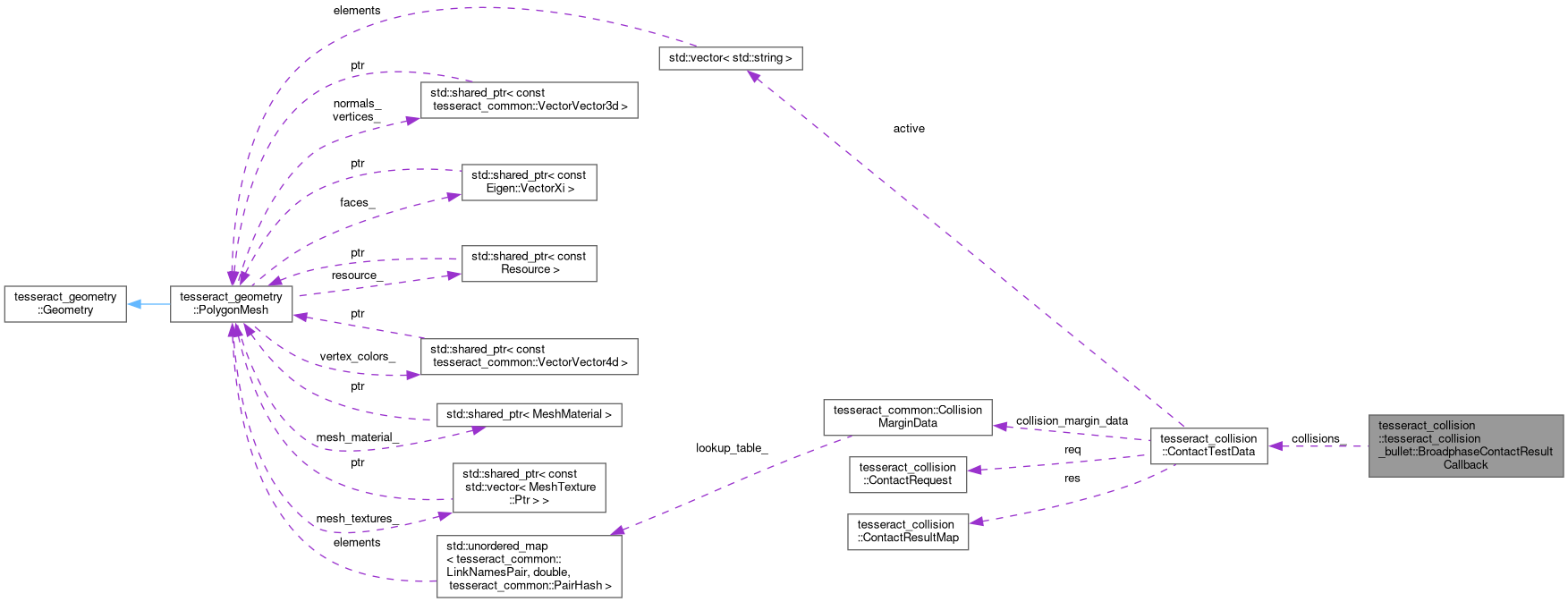
◆ collisions_
| ContactTestData& tesseract_collision::tesseract_collision_bullet::BroadphaseContactResultCallback::collisions_ |
◆ contact_distance_
| double tesseract_collision::tesseract_collision_bullet::BroadphaseContactResultCallback::contact_distance_ |
◆ verbose_
| bool tesseract_collision::tesseract_collision_bullet::BroadphaseContactResultCallback::verbose_ |
The documentation for this struct was generated from the following files: