|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
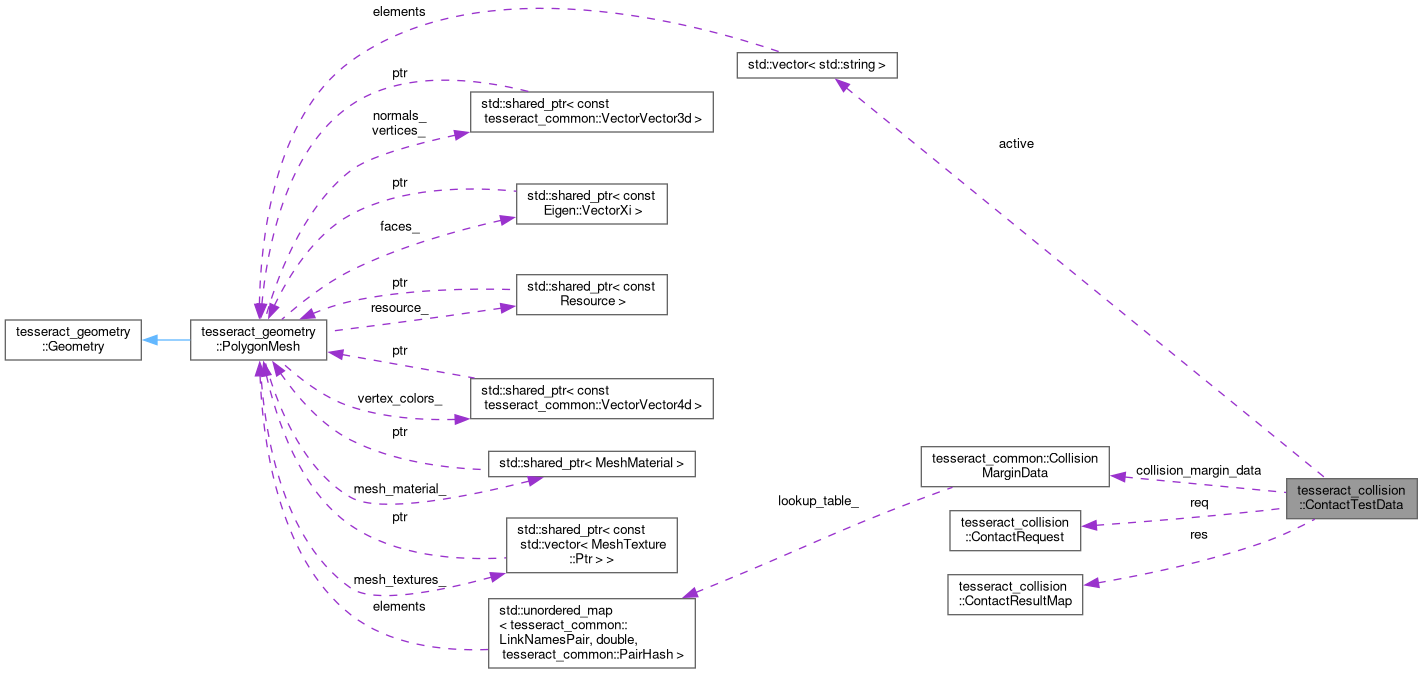
This data is intended only to be used internal to the collision checkers as a container and should not be externally used by other libraries or packages. More...
#include <types.h>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | ContactTestData ()=default |
| ContactTestData (const std::vector< std::string > &active, CollisionMarginData collision_margin_data, IsContactAllowedFn fn, ContactRequest req, ContactResultMap &res) | |
Public Attributes | |
| const std::vector< std::string > * | active = nullptr |
| A vector of active links. More... | |
| CollisionMarginData | collision_margin_data { 0 } |
| The current contact_distance threshold. More... | |
| IsContactAllowedFn | fn = nullptr |
| The allowed collision function used to check if two links should be excluded from collision checking. More... | |
| ContactRequest | req |
| The type of contact request data. More... | |
| ContactResultMap * | res = nullptr |
| Distance query results information. More... | |
| bool | done = false |
| Indicate if search is finished. More... | |
This data is intended only to be used internal to the collision checkers as a container and should not be externally used by other libraries or packages.
|
default |
| tesseract_collision::ContactTestData::ContactTestData | ( | const std::vector< std::string > & | active, |
| CollisionMarginData | collision_margin_data, | ||
| IsContactAllowedFn | fn, | ||
| ContactRequest | req, | ||
| ContactResultMap & | res | ||
| ) |
| const std::vector<std::string>* tesseract_collision::ContactTestData::active = nullptr |
A vector of active links.
| CollisionMarginData tesseract_collision::ContactTestData::collision_margin_data { 0 } |
The current contact_distance threshold.
| bool tesseract_collision::ContactTestData::done = false |
Indicate if search is finished.
| IsContactAllowedFn tesseract_collision::ContactTestData::fn = nullptr |
The allowed collision function used to check if two links should be excluded from collision checking.
| ContactRequest tesseract_collision::ContactTestData::req |
The type of contact request data.
| ContactResultMap* tesseract_collision::ContactTestData::res = nullptr |
Distance query results information.