|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
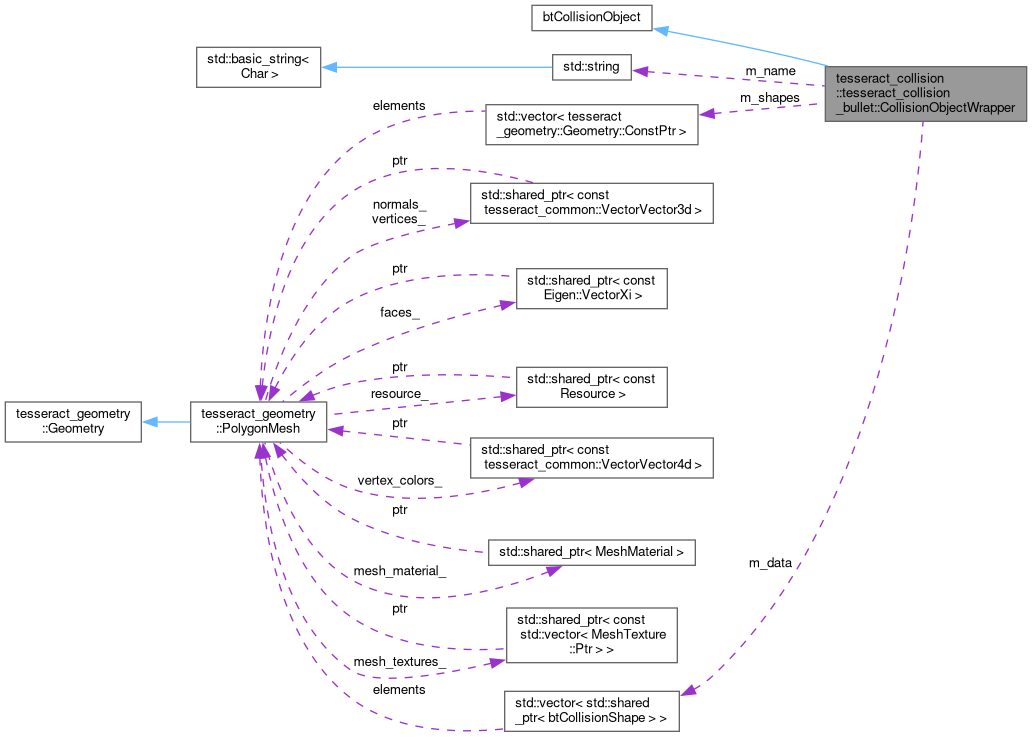
This is a tesseract bullet collsion object. More...
#include <bullet_utils.h>
Public Types | |
| using | Ptr = std::shared_ptr< CollisionObjectWrapper > |
| using | ConstPtr = std::shared_ptr< const CollisionObjectWrapper > |
Public Member Functions | |
| CollisionObjectWrapper ()=default | |
| CollisionObjectWrapper (std::string name, const int &type_id, CollisionShapesConst shapes, tesseract_common::VectorIsometry3d shape_poses) | |
| const std::string & | getName () const |
| Get the collision object name. More... | |
| const int & | getTypeID () const |
| Get a user defined type. More... | |
| bool | sameObject (const CollisionObjectWrapper &other) const |
| Check if two CollisionObjectWrapper objects point to the same source object. More... | |
| const CollisionShapesConst & | getCollisionGeometries () const |
| const tesseract_common::VectorIsometry3d & | getCollisionGeometriesTransforms () const |
| void | getAABB (btVector3 &aabb_min, btVector3 &aabb_max) const |
| Get the collision objects axis aligned bounding box. More... | |
| std::shared_ptr< CollisionObjectWrapper > | clone () |
| This clones the collision objects but not the collision shape wich is const. More... | |
| void | manage (const std::shared_ptr< btCollisionShape > &t) |
| void | manageReserve (std::size_t s) |
Public Attributes | |
| short int | m_collisionFilterGroup { btBroadphaseProxy::KinematicFilter } |
| short int | m_collisionFilterMask { btBroadphaseProxy::StaticFilter | btBroadphaseProxy::KinematicFilter } |
| bool | m_enabled { true } |
Protected Attributes | |
| std::string | m_name |
| The name of the collision object. More... | |
| int | m_type_id { -1 } |
| A user defined type id. More... | |
| CollisionShapesConst | m_shapes {} |
| The shapes poses information. More... | |
| tesseract_common::VectorIsometry3d | m_shape_poses {} |
| std::vector< std::shared_ptr< btCollisionShape > > | m_data {} |
| This manages the collision shape pointer so they get destroyed. More... | |
This is a tesseract bullet collsion object.
It is a wrapper around bullet's collision object which contains specific information related to tesseract
| using tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::ConstPtr = std::shared_ptr<const CollisionObjectWrapper> |
| using tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::Ptr = std::shared_ptr<CollisionObjectWrapper> |
|
default |
| tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::CollisionObjectWrapper | ( | std::string | name, |
| const int & | type_id, | ||
| CollisionShapesConst | shapes, | ||
| tesseract_common::VectorIsometry3d | shape_poses | ||
| ) |
| std::shared_ptr< CollisionObjectWrapper > tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::clone | ( | ) |
This clones the collision objects but not the collision shape wich is const.
| void tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::getAABB | ( | btVector3 & | aabb_min, |
| btVector3 & | aabb_max | ||
| ) | const |
Get the collision objects axis aligned bounding box.
| aabb_min | The minimum point |
| aabb_max | The maximum point |
| const CollisionShapesConst & tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::getCollisionGeometries | ( | ) | const |
| const tesseract_common::VectorIsometry3d & tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::getCollisionGeometriesTransforms | ( | ) | const |
| const std::string & tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::getName | ( | ) | const |
Get the collision object name.
| const int & tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::getTypeID | ( | ) | const |
Get a user defined type.
| void tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::manage | ( | const std::shared_ptr< btCollisionShape > & | t | ) |
| void tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::manageReserve | ( | std::size_t | s | ) |
| bool tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::sameObject | ( | const CollisionObjectWrapper & | other | ) | const |
Check if two CollisionObjectWrapper objects point to the same source object.
| short int tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::m_collisionFilterGroup { btBroadphaseProxy::KinematicFilter } |
| short int tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::m_collisionFilterMask { btBroadphaseProxy::StaticFilter | btBroadphaseProxy::KinematicFilter } |
|
protected |
This manages the collision shape pointer so they get destroyed.
| bool tesseract_collision::tesseract_collision_bullet::CollisionObjectWrapper::m_enabled { true } |
|
protected |
The name of the collision object.
|
protected |
|
protected |
The shapes poses information.
|
protected |
A user defined type id.