|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
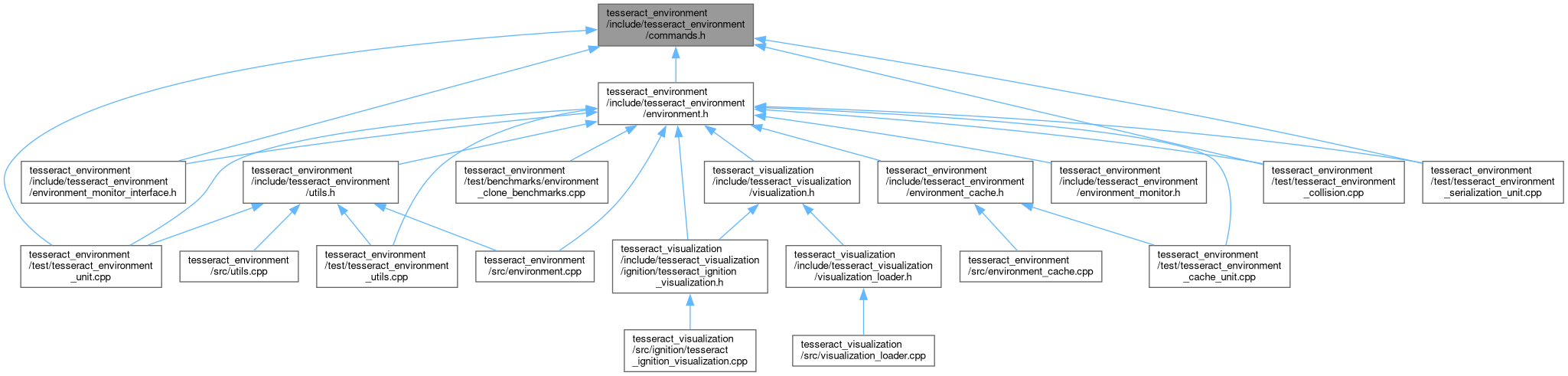
This contains classes for recording operations applied to the environment for tracking changes. This is mainly support distributed systems to keep multiple instances up-to-date. More...
#include <tesseract_environment/commands/add_contact_managers_plugin_info_command.h>#include <tesseract_environment/commands/add_link_command.h>#include <tesseract_environment/commands/add_kinematics_information_command.h>#include <tesseract_environment/commands/add_scene_graph_command.h>#include <tesseract_environment/commands/change_joint_acceleration_limits_command.h>#include <tesseract_environment/commands/change_joint_origin_command.h>#include <tesseract_environment/commands/change_joint_position_limits_command.h>#include <tesseract_environment/commands/change_joint_velocity_limits_command.h>#include <tesseract_environment/commands/change_link_collision_enabled_command.h>#include <tesseract_environment/commands/change_link_origin_command.h>#include <tesseract_environment/commands/change_link_visibility_command.h>#include <tesseract_environment/commands/modify_allowed_collisions_command.h>#include <tesseract_environment/commands/move_joint_command.h>#include <tesseract_environment/commands/move_link_command.h>#include <tesseract_environment/commands/remove_allowed_collision_link_command.h>#include <tesseract_environment/commands/remove_joint_command.h>#include <tesseract_environment/commands/remove_link_command.h>#include <tesseract_environment/commands/replace_joint_command.h>#include <tesseract_environment/commands/change_collision_margins_command.h>#include <tesseract_environment/commands/set_active_continuous_contact_manager_command.h>#include <tesseract_environment/commands/set_active_discrete_contact_manager_command.h>
Go to the source code of this file.
This contains classes for recording operations applied to the environment for tracking changes. This is mainly support distributed systems to keep multiple instances up-to-date.