|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Tesseracts Collision Common Types. More...
#include <tesseract_common/macros.h>#include <Eigen/Core>#include <Eigen/Geometry>#include <vector>#include <memory>#include <map>#include <array>#include <unordered_map>#include <functional>#include <tesseract_geometry/geometry.h>#include <tesseract_common/types.h>#include <tesseract_common/collision_margin_data.h>#include <tesseract_common/allowed_collision_matrix.h>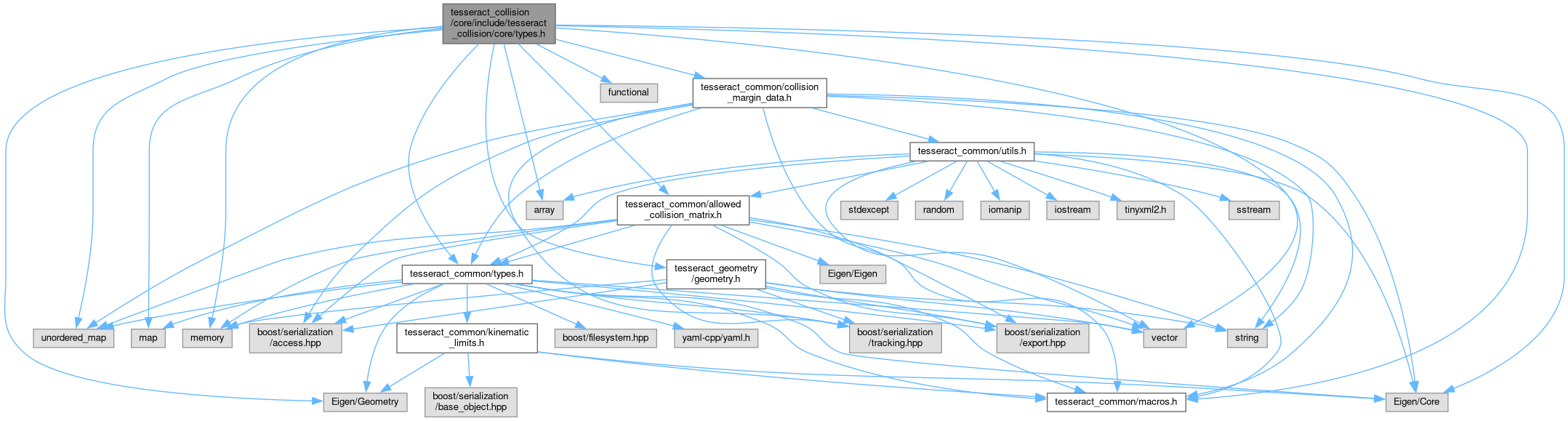

Go to the source code of this file.
Classes | |
| struct | tesseract_collision::ContactResult |
| class | tesseract_collision::ContactResultMap |
| This structure hold contact results for link pairs. More... | |
| struct | tesseract_collision::ContactRequest |
| The ContactRequest struct. More... | |
| struct | tesseract_collision::ContactTestData |
| This data is intended only to be used internal to the collision checkers as a container and should not be externally used by other libraries or packages. More... | |
| struct | tesseract_collision::ContactManagerConfig |
| Contains parameters used to configure a contact manager before a series of contact checks. More... | |
| struct | tesseract_collision::CollisionCheckConfig |
| This is a high level structure containing common information that collision checking utilities need. The goal of this config is to allow all collision checking utilities and planners to use the same data structure. More... | |
Namespaces | |
| namespace | tesseract_collision |
Variables | |
| static const std::vector< std::string > | tesseract_collision::ContactTestTypeStrings |
Tesseracts Collision Common Types.