|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
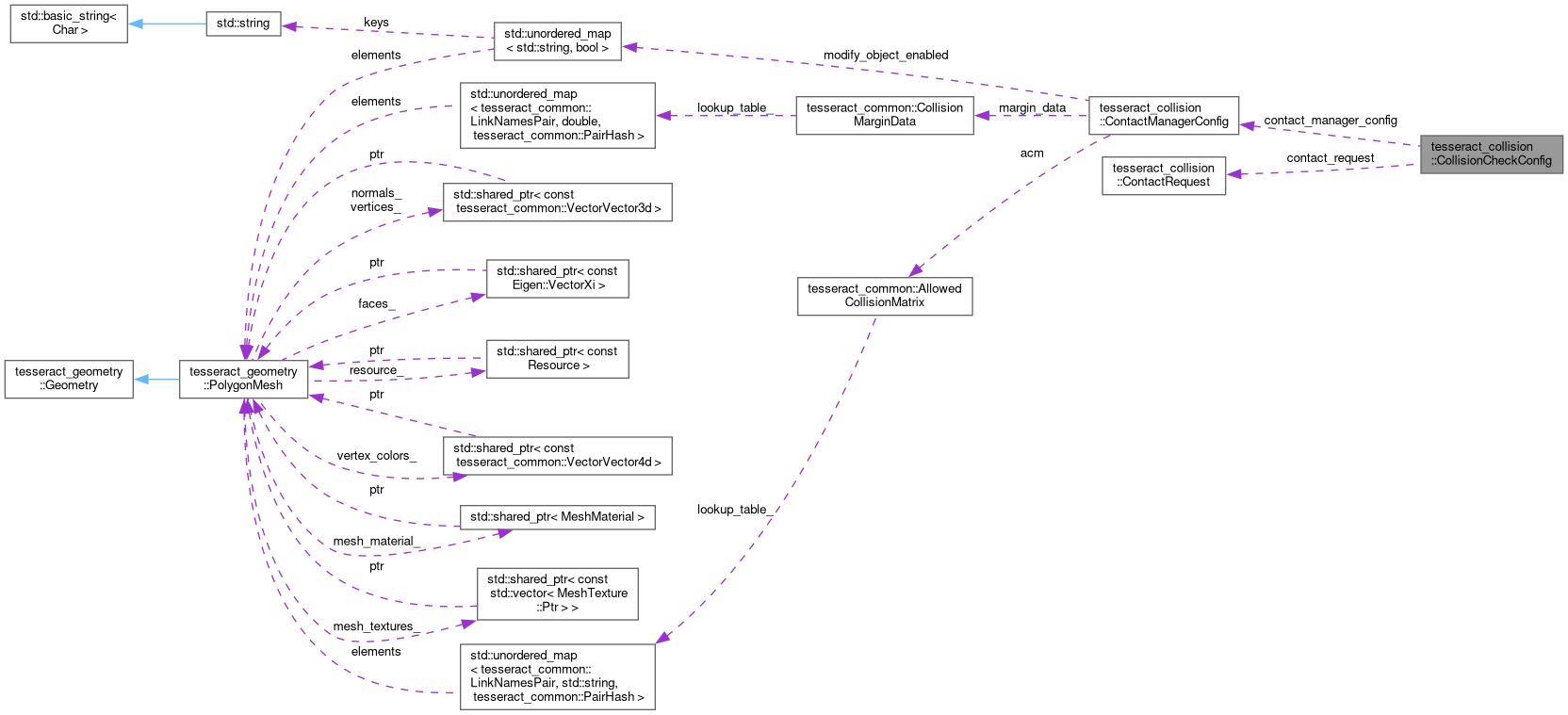
This is a high level structure containing common information that collision checking utilities need. The goal of this config is to allow all collision checking utilities and planners to use the same data structure. More...
#include <types.h>
Public Member Functions | |
| CollisionCheckConfig ()=default | |
| CollisionCheckConfig (double default_margin, ContactRequest request=ContactRequest(), CollisionEvaluatorType type=CollisionEvaluatorType::DISCRETE, double longest_valid_segment_length=0.005) | |
Public Attributes | |
| ContactManagerConfig | contact_manager_config |
| Used to configure the contact manager prior to a series of checks. More... | |
| ContactRequest | contact_request |
| ContactRequest that will be used for this check. Default test type: FIRST. More... | |
| CollisionEvaluatorType | type { CollisionEvaluatorType::DISCRETE } |
| Specifies the type of collision check to be performed. Default: DISCRETE. More... | |
| double | longest_valid_segment_length { 0.005 } |
| Longest valid segment to use if type supports lvs. Default: 0.005. More... | |
This is a high level structure containing common information that collision checking utilities need. The goal of this config is to allow all collision checking utilities and planners to use the same data structure.
|
default |
| tesseract_collision::CollisionCheckConfig::CollisionCheckConfig | ( | double | default_margin, |
| ContactRequest | request = ContactRequest(), |
||
| CollisionEvaluatorType | type = CollisionEvaluatorType::DISCRETE, |
||
| double | longest_valid_segment_length = 0.005 |
||
| ) |
| ContactManagerConfig tesseract_collision::CollisionCheckConfig::contact_manager_config |
Used to configure the contact manager prior to a series of checks.
| ContactRequest tesseract_collision::CollisionCheckConfig::contact_request |
ContactRequest that will be used for this check. Default test type: FIRST.
| double tesseract_collision::CollisionCheckConfig::longest_valid_segment_length { 0.005 } |
Longest valid segment to use if type supports lvs. Default: 0.005.
| CollisionEvaluatorType tesseract_collision::CollisionCheckConfig::type { CollisionEvaluatorType::DISCRETE } |
Specifies the type of collision check to be performed. Default: DISCRETE.