|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
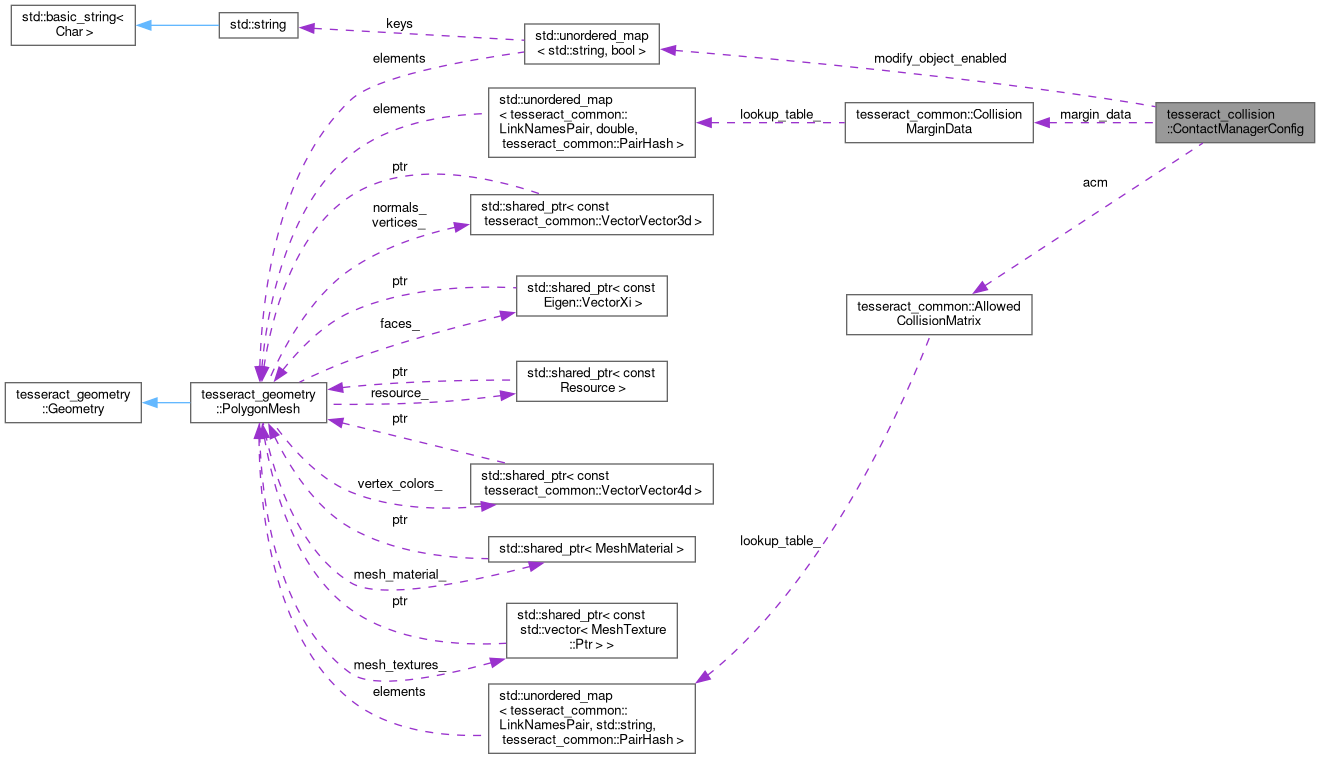
Contains parameters used to configure a contact manager before a series of contact checks. More...
#include <types.h>
Public Member Functions | |
| ContactManagerConfig ()=default | |
| ContactManagerConfig (double default_margin) | |
Public Attributes | |
| CollisionMarginOverrideType | margin_data_override_type { CollisionMarginOverrideType::NONE } |
| Identify how the collision margin data should be applied to the contact manager. More... | |
| CollisionMarginData | margin_data |
| Stores information about how the margins allowed between collision objects. More... | |
| tesseract_common::AllowedCollisionMatrix | acm |
| Additional AllowedCollisionMatrix to consider for this collision check. More... | |
| ACMOverrideType | acm_override_type { ACMOverrideType::OR } |
| Specifies how to combine the IsContactAllowedFn from acm with the one preset in the contact manager. More... | |
| std::unordered_map< std::string, bool > | modify_object_enabled |
| Each key is an object name. Objects will be enabled/disabled based on the value. Objects that aren't in the map are unmodified from the defaults. More... | |
Contains parameters used to configure a contact manager before a series of contact checks.
It should not contain information that is usually specific to a single contactTest such as CollisionObjectTransforms or specific to the way contactTests are carried out such as LVS parameters
|
default |
| tesseract_collision::ContactManagerConfig::ContactManagerConfig | ( | double | default_margin | ) |
| tesseract_common::AllowedCollisionMatrix tesseract_collision::ContactManagerConfig::acm |
Additional AllowedCollisionMatrix to consider for this collision check.
| ACMOverrideType tesseract_collision::ContactManagerConfig::acm_override_type { ACMOverrideType::OR } |
Specifies how to combine the IsContactAllowedFn from acm with the one preset in the contact manager.
| CollisionMarginData tesseract_collision::ContactManagerConfig::margin_data |
Stores information about how the margins allowed between collision objects.
| CollisionMarginOverrideType tesseract_collision::ContactManagerConfig::margin_data_override_type { CollisionMarginOverrideType::NONE } |
Identify how the collision margin data should be applied to the contact manager.
| std::unordered_map<std::string, bool> tesseract_collision::ContactManagerConfig::modify_object_enabled |
Each key is an object name. Objects will be enabled/disabled based on the value. Objects that aren't in the map are unmodified from the defaults.