|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <string>#include <vector>#include <kdl/tree.hpp>#include <kdl/jacobian.hpp>#include <console_bridge/console.h>#include <tesseract_scene_graph/graph.h>
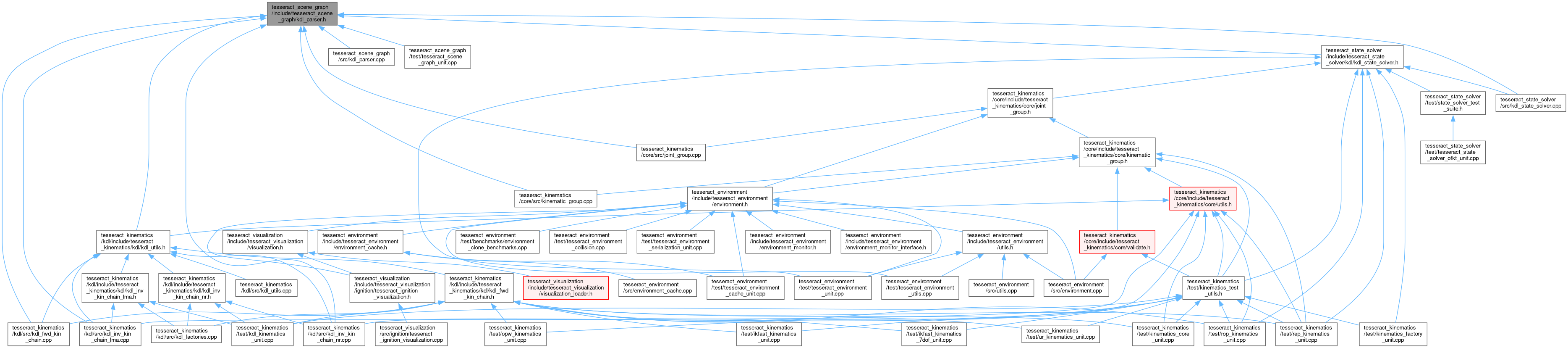
Go to the source code of this file.
Classes | |
| struct | tesseract_scene_graph::KDLTreeData |
| The KDLTreeData populated when parsing scene graph. More... | |
Namespaces | |
| namespace | tesseract_scene_graph |
Functions | |
| KDL::Frame | tesseract_scene_graph::convert (const Eigen::Isometry3d &transform) |
| Convert Eigen::Isometry3d to KDL::Frame. More... | |
| Eigen::Isometry3d | tesseract_scene_graph::convert (const KDL::Frame &frame) |
| Convert KDL::Frame to Eigen::Isometry3d. More... | |
| KDL::Vector | tesseract_scene_graph::convert (const Eigen::Vector3d &vector) |
| Convert Eigen::Vector3d to KDL::Vector. More... | |
| Eigen::Vector3d | tesseract_scene_graph::convert (const KDL::Vector &vector) |
| Convert KDL::Vector to Eigen::Vector3d. More... | |
| Eigen::MatrixXd | tesseract_scene_graph::convert (const KDL::Jacobian &jacobian) |
| Convert KDL::Jacobian to Eigen::Matrix. More... | |
| KDL::Jacobian | tesseract_scene_graph::convert (const Eigen::MatrixXd &jacobian) |
| Convert Eigen::Matrix to KDL::Jacobian. More... | |
| Eigen::MatrixXd | tesseract_scene_graph::convert (const KDL::Jacobian &jacobian, const std::vector< int > &q_nrs) |
| Convert a subset of KDL::Jacobian to Eigen::Matrix. More... | |
| KDL::Joint | tesseract_scene_graph::convert (const Joint::ConstPtr &joint) |
| Convert Tesseract Joint to KDL Joint. More... | |
| KDL::RigidBodyInertia | tesseract_scene_graph::convert (const Inertial::ConstPtr &inertial) |
| Convert Tesseract Inertail to KDL Inertial. More... | |
| KDLTreeData | tesseract_scene_graph::parseSceneGraph (const SceneGraph &scene_graph) |
| Convert a Tesseract SceneGraph into a KDL Tree. More... | |
| KDLTreeData | tesseract_scene_graph::parseSceneGraph (const SceneGraph &scene_graph, const std::vector< std::string > &joint_names, const std::unordered_map< std::string, double > &joint_values) |
| Convert a portion of a Tesseract SceneGraph into a KDL Tree. More... | |