#include <add_link_command.h>
|
| template<class Archive > |
| void | serialize (Archive &ar, const unsigned int version) |
| |
◆ ConstPtr
◆ Ptr
◆ AddLinkCommand() [1/3]
| tesseract_environment::AddLinkCommand::AddLinkCommand |
( |
| ) |
|
|
inline |
◆ AddLinkCommand() [2/3]
Adds or replace a link to the environment.
If the link exists and replace_allowed equals true:
This command should replace the current link with the new link
If the link exists and replace_allowed equals false:
This command should result in an error
If the link does not exist:
This command should attach the link to the root link with a fixed joint
with a joint name of joint_{link name}".
- Parameters
-
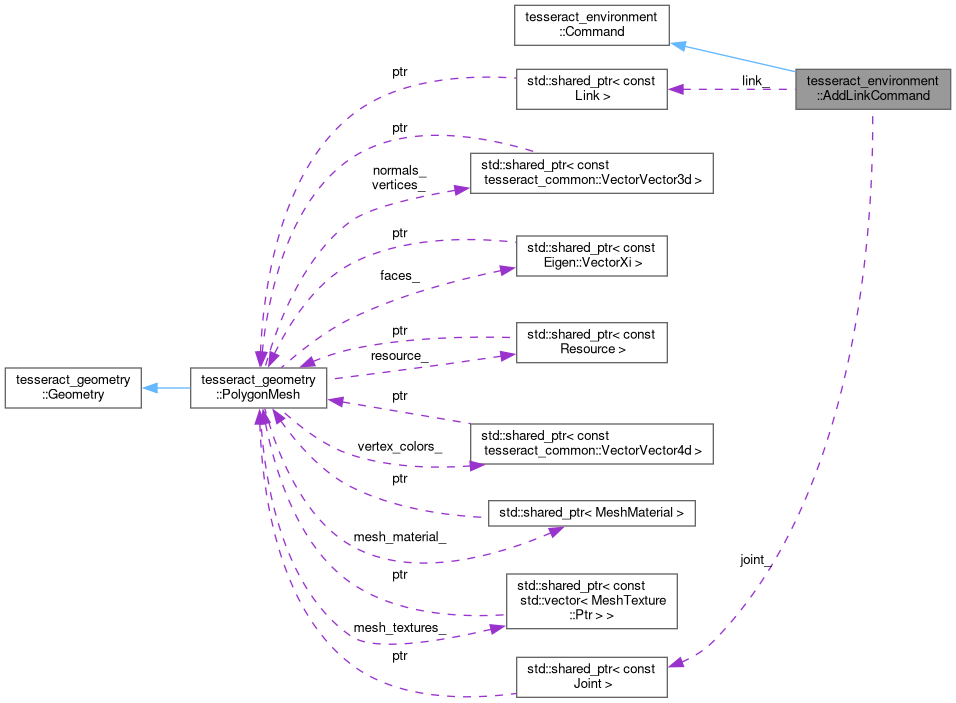
| link | The link to be added to the graph |
| replace_allowed | If true then if the link exists it will be replaced, otherwise if false it will fail. |
◆ AddLinkCommand() [3/3]
Adds a link and joint in the environment.
If the link and joint exist and replace is allowed
This command will replace both link and joint if the link is the child link, otherwise this results in error
If the link and joint exist and replace is not allowed
This command should result in an error
If the link or joint only exists:
This command should result in an error
- Parameters
-
| link | The link to be added to the graph |
| joint | The joint to be used to attach link to environment |
| replace_allowed | If true then if the link and joint exists it will be replaced, otherwise if false it will fail. |
- Todo:
- if joint is not fixed we should verify that limits are provided
◆ getJoint()
◆ getLink()
◆ operator!=()
| bool tesseract_environment::AddLinkCommand::operator!= |
( |
const AddLinkCommand & |
rhs | ) |
const |
◆ operator==()
| bool tesseract_environment::AddLinkCommand::operator== |
( |
const AddLinkCommand & |
rhs | ) |
const |
◆ replaceAllowed()
| bool tesseract_environment::AddLinkCommand::replaceAllowed |
( |
| ) |
const |
|
inline |
◆ serialize()
template<class Archive >
| void tesseract_environment::AddLinkCommand::serialize |
( |
Archive & |
ar, |
|
|
const unsigned int |
version |
|
) |
| |
|
private |
◆ boost::serialization::access
| friend class boost::serialization::access |
|
friend |
◆ joint_
◆ link_
◆ replace_allowed_
| bool tesseract_environment::AddLinkCommand::replace_allowed_ { false } |
|
private |
The documentation for this class was generated from the following files:
 Public Types inherited from tesseract_environment::Command
Public Types inherited from tesseract_environment::Command