#include <bullet_utils.h>
|
| | CastCollisionCollector (ContactTestData &collisions, COW::Ptr cow, double contact_distance, bool verbose=false) |
| |
| btScalar | addSingleResult (btManifoldPoint &cp, const btCollisionObjectWrapper *colObj0Wrap, int partId0, int index0, const btCollisionObjectWrapper *colObj1Wrap, int partId1, int index1) override |
| |
| bool | needsCollision (btBroadphaseProxy *proxy0) const override |
| |
◆ CastCollisionCollector()
| tesseract_collision::tesseract_collision_bullet::CastCollisionCollector::CastCollisionCollector |
( |
ContactTestData & |
collisions, |
|
|
COW::Ptr |
cow, |
|
|
double |
contact_distance, |
|
|
bool |
verbose = false |
|
) |
| |
◆ addSingleResult()
| btScalar tesseract_collision::tesseract_collision_bullet::CastCollisionCollector::addSingleResult |
( |
btManifoldPoint & |
cp, |
|
|
const btCollisionObjectWrapper * |
colObj0Wrap, |
|
|
int |
partId0, |
|
|
int |
index0, |
|
|
const btCollisionObjectWrapper * |
colObj1Wrap, |
|
|
int |
partId1, |
|
|
int |
index1 |
|
) |
| |
|
override |
◆ needsCollision()
| bool tesseract_collision::tesseract_collision_bullet::CastCollisionCollector::needsCollision |
( |
btBroadphaseProxy * |
proxy0 | ) |
const |
|
override |
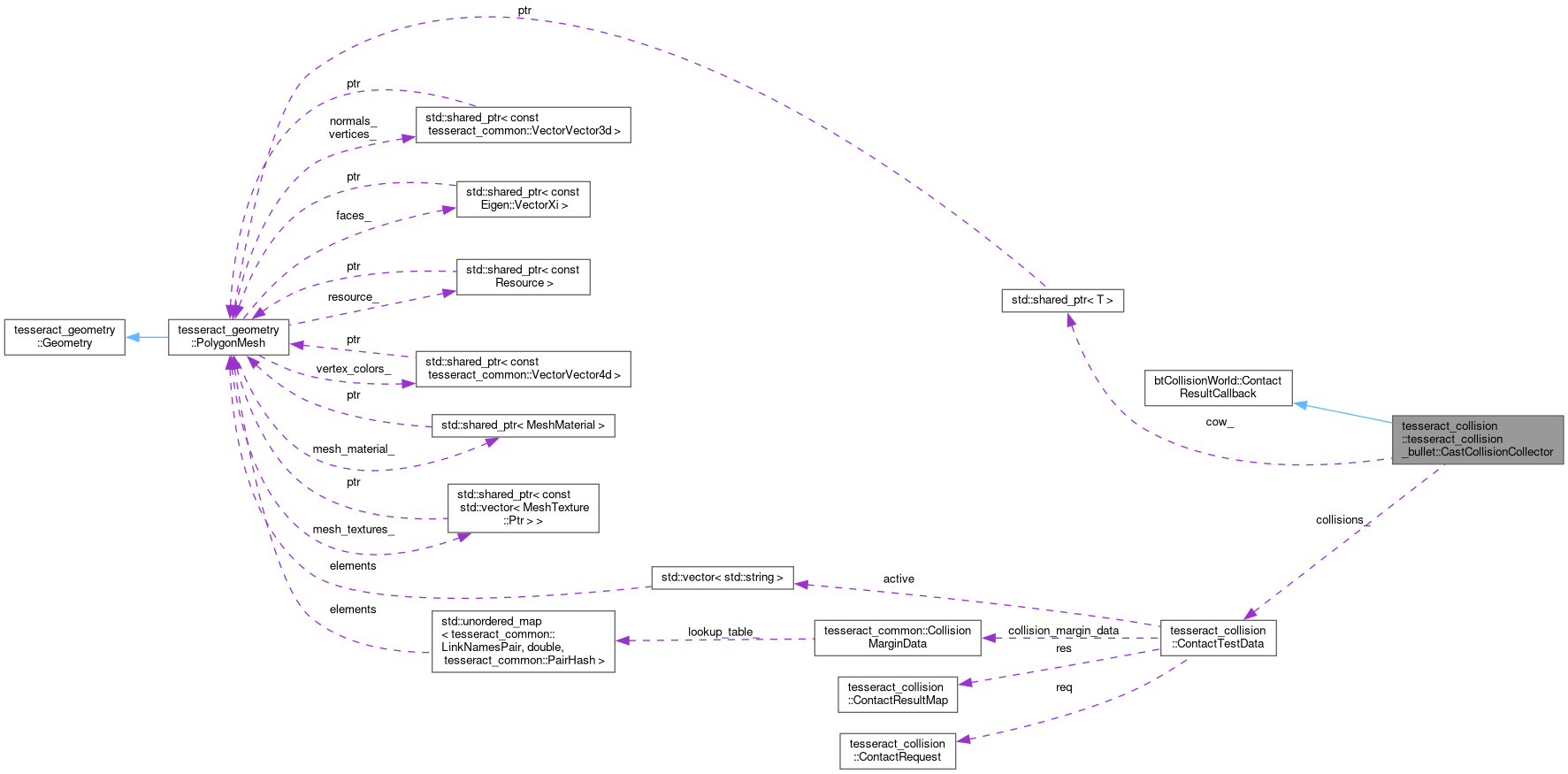
◆ collisions_
| ContactTestData& tesseract_collision::tesseract_collision_bullet::CastCollisionCollector::collisions_ |
◆ contact_distance_
| double tesseract_collision::tesseract_collision_bullet::CastCollisionCollector::contact_distance_ |
◆ cow_
| const COW::Ptr tesseract_collision::tesseract_collision_bullet::CastCollisionCollector::cow_ |
◆ verbose_
| bool tesseract_collision::tesseract_collision_bullet::CastCollisionCollector::verbose_ |
The documentation for this struct was generated from the following files: