|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
An arrow marker. More...
#include <arrow_marker.h>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | ArrowMarker ()=default |
| ArrowMarker (const Eigen::Vector3d &pt1, const Eigen::Vector3d &pt2) | |
| Define an arrow marker using two points. More... | |
| int | getType () const override |
| Get the marker type. More... | |
 Public Member Functions inherited from tesseract_visualization::Marker Public Member Functions inherited from tesseract_visualization::Marker | |
| Marker ()=default | |
| virtual | ~Marker ()=default |
| Marker (const Marker &)=default | |
| Marker & | operator= (const Marker &)=default |
| Marker (Marker &&)=default | |
| Marker & | operator= (Marker &&)=default |
| virtual int | getType () const =0 |
| Get the marker type. More... | |
| virtual void | setParentLink (std::string parent_link) |
| The parent link name the marker should be attached to. More... | |
| virtual const std::string & | getParentLink () const |
| Get the parent link name that marker should be attached to. More... | |
| virtual void | setLifetime (const std::chrono::steady_clock::duration &lifetime) |
| Set the lifetime of the this marker. More... | |
| virtual std::chrono::steady_clock::duration | getLifetime () const |
| Get the lifetime of this Marker. More... | |
| virtual void | setLayer (int layer) |
| Set the layer of this Marker. More... | |
| virtual int | getLayer () const |
| Get the layer of this Marker. More... | |
| virtual void | setScale (const Eigen::Vector3d &scale) |
| Set the marker scale. More... | |
| virtual const Eigen::Vector3d & | getScale () const |
| Get the marker scale. More... | |
Public Attributes | |
| double | shaft_length { 0.8 } |
| The arrow shaft length. More... | |
| double | shaft_radius { 0.1 } |
| The arrow shaft radius. More... | |
| double | head_length { 0.2 } |
| The arrow head length. More... | |
| double | head_radius { 0.15 } |
| The arrow head radius. More... | |
| Eigen::Isometry3d | pose { Eigen::Isometry3d::Identity() } |
| The arrow pose. More... | |
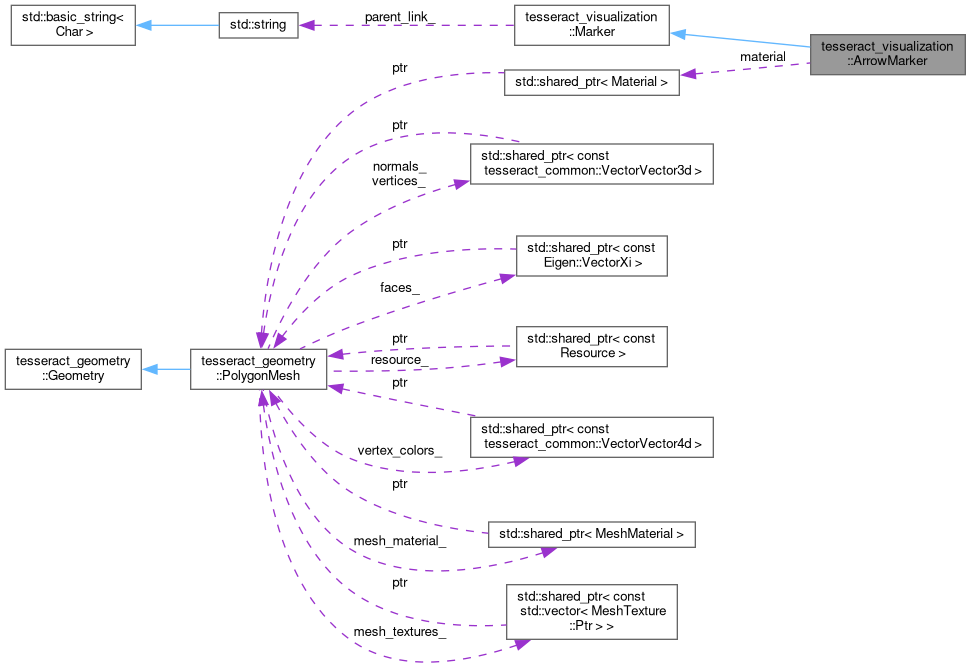
| tesseract_scene_graph::Material::Ptr | material |
| The material information for the marker. More... | |
Additional Inherited Members | |
| Public Types inherited from tesseract_visualization::Marker | |
| using | Ptr = std::shared_ptr< Marker > |
| using | ConstPtr = std::shared_ptr< const Marker > |
| Protected Attributes inherited from tesseract_visualization::Marker | |
| std::chrono::steady_clock::duration | lifetime_ { 0 } |
| The lifetime of this Marker. More... | |
| std::string | parent_link_ |
| The parent link the marker is attched to. If empty relative to world. More... | |
| int | layer_ { 0 } |
| The layer of the marker. More... | |
| Eigen::Vector3d | scale_ { Eigen::Vector3d(1, 1, 1) } |
| The marker scale. More... | |
An arrow marker.
The arrow will be created along the z-axis of the provided pose with the base of the shaft at the origin point in the positive direction
|
default |
|
inline |
Define an arrow marker using two points.
The class parameters are calculated based on distance
| pt1 | The starting point |
| pt2 | The final point |
|
inlineoverridevirtual |
| double tesseract_visualization::ArrowMarker::head_length { 0.2 } |
The arrow head length.
| double tesseract_visualization::ArrowMarker::head_radius { 0.15 } |
The arrow head radius.
| tesseract_scene_graph::Material::Ptr tesseract_visualization::ArrowMarker::material |
The material information for the marker.
| Eigen::Isometry3d tesseract_visualization::ArrowMarker::pose { Eigen::Isometry3d::Identity() } |
The arrow pose.
| double tesseract_visualization::ArrowMarker::shaft_length { 0.8 } |
The arrow shaft length.
| double tesseract_visualization::ArrowMarker::shaft_radius { 0.1 } |
The arrow shaft radius.