|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <tesseract_collision/vhacd/inc/vhacdMesh.h>#include <tesseract_collision/vhacd/inc/vhacdVector.h>#include <assert.h>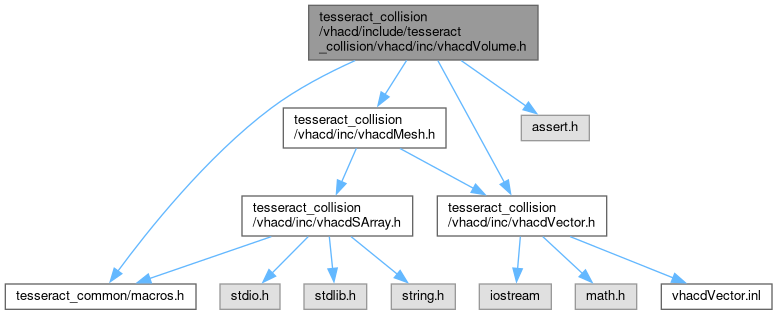
Go to the source code of this file.
Namespaces | |
| namespace | tesseract_collision |
| namespace | tesseract_collision::VHACD |
Functions | |
| int32_t | tesseract_collision::VHACD::TriBoxOverlap (const Vec3< double > &boxcenter, const Vec3< double > &boxhalfsize, const Vec3< double > &triver0, const Vec3< double > &triver1, const Vec3< double > &triver2) |
| template<class T > | |
| void | tesseract_collision::VHACD::ComputeAlignedPoint (const T *const points, const uint32_t idx, const Vec3< double > &barycenter, const double(&rot)[3][3], Vec3< double > &pt) |
| template<> | |
| void | tesseract_collision::VHACD::ComputeAlignedPoint< float > (const float *const points, const uint32_t idx, const Vec3< double > &barycenter, const double(&rot)[3][3], Vec3< double > &pt) |
| template<> | |
| void | tesseract_collision::VHACD::ComputeAlignedPoint< double > (const double *const points, const uint32_t idx, const Vec3< double > &barycenter, const double(&rot)[3][3], Vec3< double > &pt) |