|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Every time a vertex is visited for the first time add a new node to the tree. More...
Public Member Functions | |
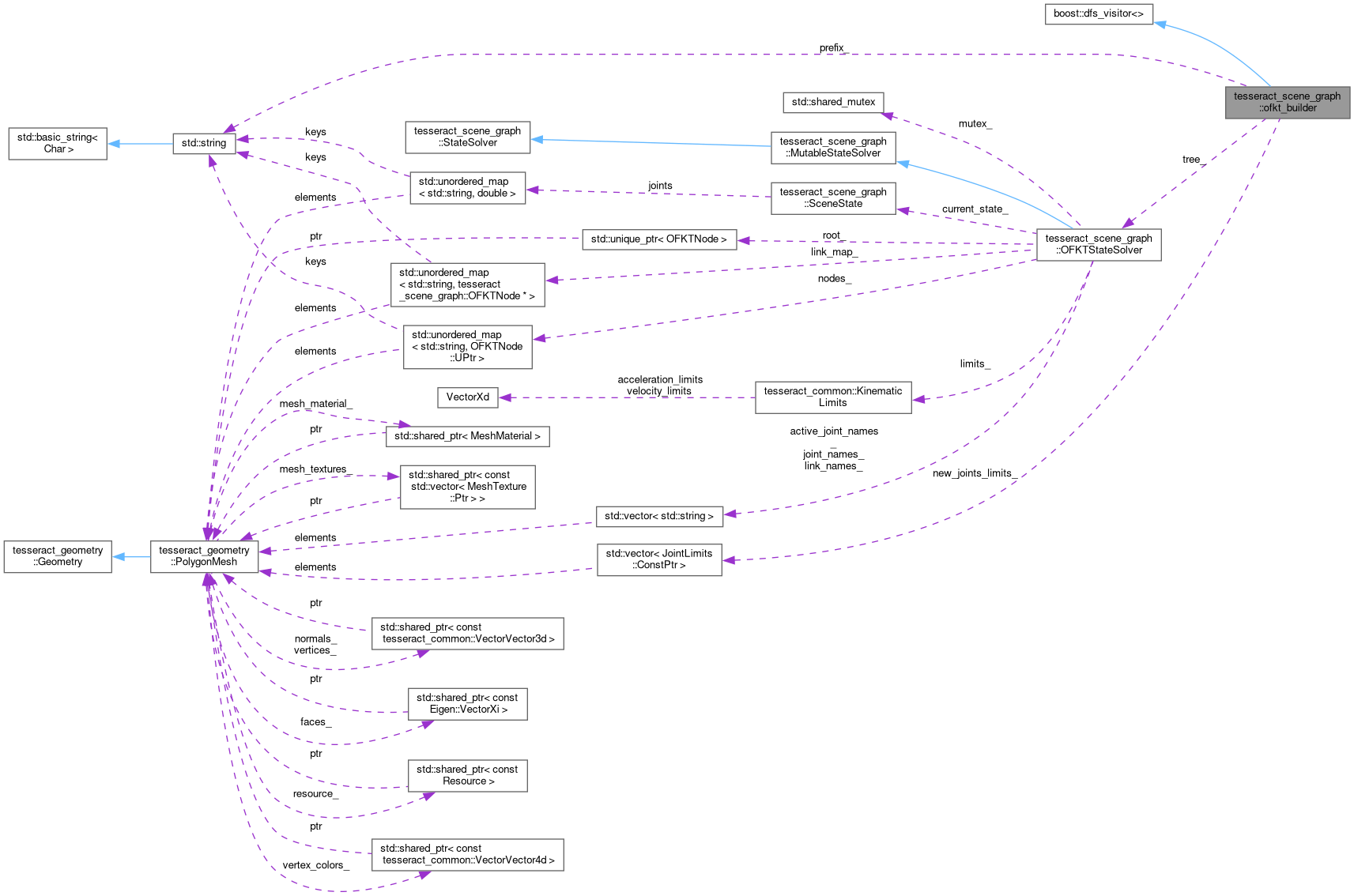
| ofkt_builder (OFKTStateSolver &tree, std::vector< JointLimits::ConstPtr > &new_joints_limits, std::string prefix="") | |
| template<class u , class g > | |
| void | discover_vertex (u vertex, const g &graph) |
Protected Attributes | |
| OFKTStateSolver & | tree_ |
| std::vector< JointLimits::ConstPtr > & | new_joints_limits_ |
| std::string | prefix_ |
Every time a vertex is visited for the first time add a new node to the tree.
|
inline |
|
inline |
|
protected |
|
protected |
|
protected |