|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <gtest/gtest.h>#include <tesseract_visualization/trajectory_player.h>#include <tesseract_visualization/trajectory_interpolator.h>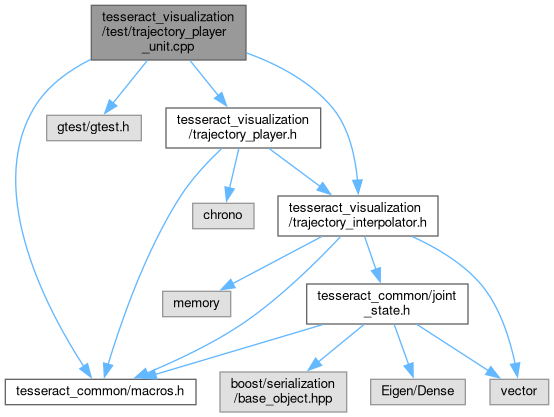
Functions | |
| for (long i=0;i< 10;++i) | |
| player | setTrajectory (trajectory) |
| EXPECT_NEAR (player.trajectoryDuration(), 9, 1e-5) | |
| EXPECT_NEAR (player.currentDuration(), 0, 1e-5) | |
| EXPECT_NEAR (s.time, 9, 1e-5) | |
| EXPECT_NEAR (s.position(0), 9, 1e-5) | |
| EXPECT_TRUE (player.isFinished()) | |
| player | setCurrentDuration (0) |
| EXPECT_FALSE (player.isFinished()) | |
| EXPECT_NEAR (s.time, 0, 1e-5) | |
| EXPECT_NEAR (s.position(0), 0, 1e-5) | |
| TrajectoryInterpolator | interpolator (trajectory) |
| EXPECT_EQ (interpolator.getStateCount(), 10) | |
| int | main (int argc, char **argv) |
Variables | |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH | TESSERACT_COMMON_IGNORE_WARNINGS_POP |
| std::vector< std::string > | joint_names = { "joint_1", "joint_2", "joint_3", "joint_4", "joint_5", "joint_6" } |
| JointTrajectory | trajectory |
| TrajectoryPlayer | player |
| JointState | s = interpolator.getState(10) |
| EXPECT_EQ | ( | interpolator. | getStateCount(), |
| 10 | |||
| ) |
| EXPECT_FALSE | ( | player. | isFinished() | ) |
| EXPECT_NEAR | ( | player. | currentDuration(), |
| 0 | , | ||
| 1e- | 5 | ||
| ) |
| EXPECT_NEAR | ( | player. | trajectoryDuration(), |
| 9 | , | ||
| 1e- | 5 | ||
| ) |
| EXPECT_NEAR | ( | s. | position0, |
| 0 | , | ||
| 1e- | 5 | ||
| ) |
| EXPECT_NEAR | ( | s. | position0, |
| 9 | , | ||
| 1e- | 5 | ||
| ) |
| EXPECT_NEAR | ( | s. | time, |
| 0 | , | ||
| 1e- | 5 | ||
| ) |
| EXPECT_NEAR | ( | s. | time, |
| 9 | , | ||
| 1e- | 5 | ||
| ) |
| EXPECT_TRUE | ( | player. | isFinished() | ) |
| for | ( | ) |
| TrajectoryInterpolator interpolator | ( | trajectory | ) |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| player setCurrentDuration | ( | 0 | ) |
| player setTrajectory | ( | trajectory | ) |
| std::vector<std::string> joint_names = { "joint_1", "joint_2", "joint_3", "joint_4", "joint_5", "joint_6" } |
| TrajectoryPlayer player |
| JointState s = interpolator.getState(10) |
| TESSERACT_COMMON_IGNORE_WARNINGS_PUSH TESSERACT_COMMON_IGNORE_WARNINGS_POP |
| JointTrajectory trajectory |