|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
A callback function that is called as part of the broadphase collision checking. More...
#include <bullet_utils.h>
Public Member Functions | |
| TesseractCollisionPairCallback (const btDispatcherInfo &dispatchInfo, btCollisionDispatcher *dispatcher, BroadphaseContactResultCallback &results_callback) | |
| ~TesseractCollisionPairCallback () override=default | |
| TesseractCollisionPairCallback (const TesseractCollisionPairCallback &)=default | |
| TesseractCollisionPairCallback & | operator= (const TesseractCollisionPairCallback &)=delete |
| TesseractCollisionPairCallback (TesseractCollisionPairCallback &&)=default | |
| TesseractCollisionPairCallback & | operator= (TesseractCollisionPairCallback &&)=delete |
| bool | processOverlap (btBroadphasePair &pair) override |
Private Attributes | |
| const btDispatcherInfo & | dispatch_info_ |
| btCollisionDispatcher * | dispatcher_ |
| BroadphaseContactResultCallback & | results_callback_ |
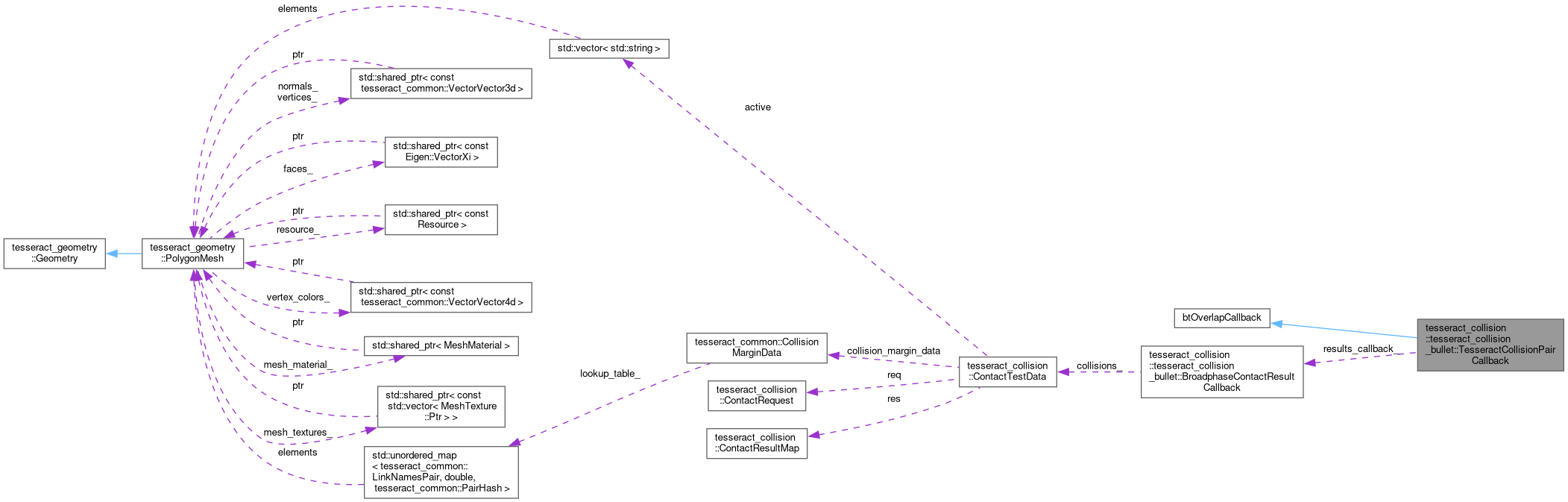
A callback function that is called as part of the broadphase collision checking.
If the AABB of two collision objects are overlapping the processOverlap method is called and they are checked for collision/distance and the results are stored in collision_.
| tesseract_collision::tesseract_collision_bullet::TesseractCollisionPairCallback::TesseractCollisionPairCallback | ( | const btDispatcherInfo & | dispatchInfo, |
| btCollisionDispatcher * | dispatcher, | ||
| BroadphaseContactResultCallback & | results_callback | ||
| ) |
|
overridedefault |
|
default |
|
default |
|
delete |
|
delete |
|
override |
|
private |
|
private |
|
private |