|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
This contains utility function validate things like forward kinematics match inverse kinematics. More...
#include <tesseract_common/macros.h>#include <Eigen/Geometry>#include <console_bridge/console.h>#include <algorithm>#include <sstream>#include <tesseract_common/utils.h>#include <tesseract_kinematics/core/validate.h>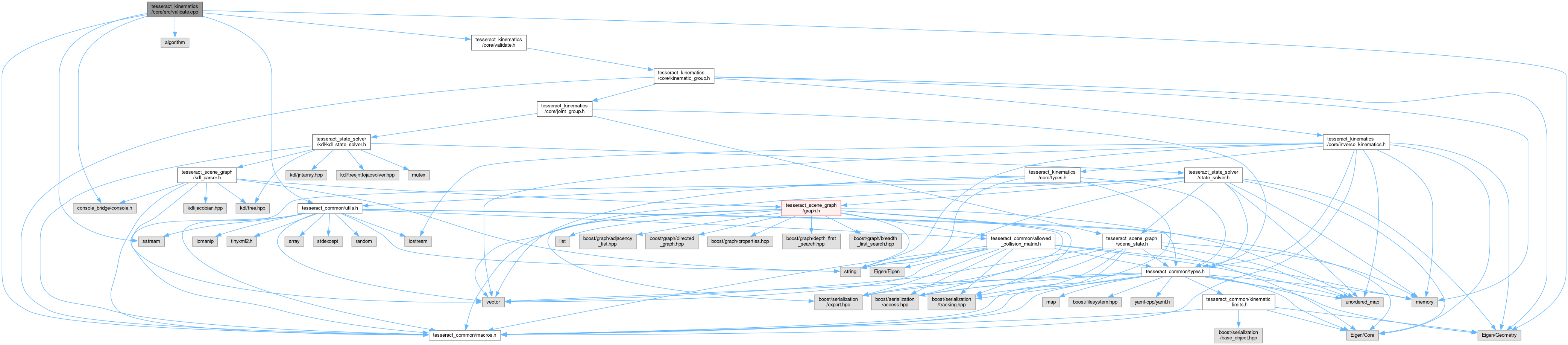
Namespaces | |
| namespace | tesseract_kinematics |
Functions | |
| bool | tesseract_kinematics::checkKinematics (const KinematicGroup &manip, double tol=1e-3) |
| This compares calcFwdKin to calcInvKin for a KinematicGroup. More... | |
This contains utility function validate things like forward kinematics match inverse kinematics.