|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
This is a collection of common methods. More...
#include <tesseract_common/macros.h>#include <map>#include <vector>#include <Eigen/Geometry>#include <tesseract_collision/core/types.h>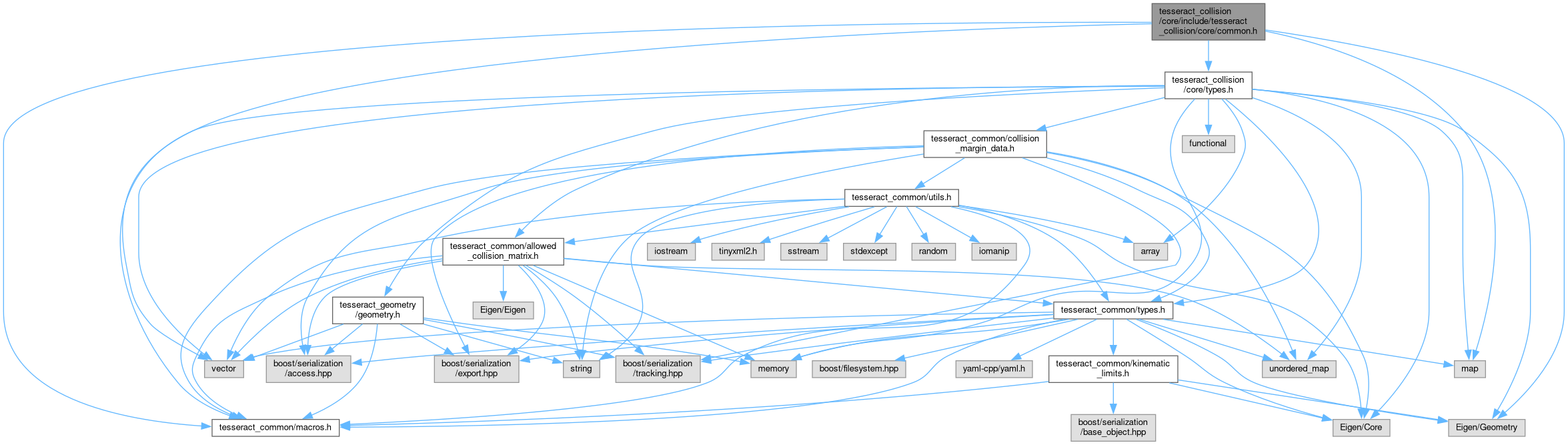

Go to the source code of this file.
Namespaces | |
| namespace | tesseract_collision |
Typedefs | |
| using | tesseract_collision::ObjectPairKey = std::pair< std::string, std::string > |
Functions | |
| std::vector< ObjectPairKey > | tesseract_collision::getCollisionObjectPairs (const std::vector< std::string > &active_links, const std::vector< std::string > &static_links, const IsContactAllowedFn &acm=nullptr) |
| Get a vector of possible collision object pairs. More... | |
| bool | tesseract_collision::isLinkActive (const std::vector< std::string > &active, const std::string &name) |
| This will check if a link is active provided a list. If the list is empty the link is considered active. More... | |
| bool | tesseract_collision::isContactAllowed (const std::string &name1, const std::string &name2, const IsContactAllowedFn &acm, bool verbose=false) |
| Determine if contact is allowed between two objects. More... | |
| ContactResult * | tesseract_collision::processResult (ContactTestData &cdata, ContactResult &contact, const std::pair< std::string, std::string > &key, bool found) |
| processResult Processes the ContactResult based on the information in the ContactTestData More... | |
| void | tesseract_collision::scaleVertices (tesseract_common::VectorVector3d &vertices, const Eigen::Vector3d ¢er, const Eigen::Vector3d &scale) |
| Apply scaling to the geometry coordinates. More... | |
| void | tesseract_collision::scaleVertices (tesseract_common::VectorVector3d &vertices, const Eigen::Vector3d &scale) |
| Apply scaling to the geometry coordinates. More... | |
| bool | tesseract_collision::writeSimplePlyFile (const std::string &path, const tesseract_common::VectorVector3d &vertices, const std::vector< Eigen::Vector3i > &vectices_color, const Eigen::VectorXi &faces, int num_faces) |
| Write a simple ply file given vertices and faces. More... | |
| bool | tesseract_collision::writeSimplePlyFile (const std::string &path, const tesseract_common::VectorVector3d &vertices, const Eigen::VectorXi &faces, int num_faces) |
| Write a simple ply file given vertices and faces. More... | |
| int | tesseract_collision::loadSimplePlyFile (const std::string &path, tesseract_common::VectorVector3d &vertices, Eigen::VectorXi &faces, bool triangles_only=false) |
| Loads a simple ply file given a path. More... | |
This is a collection of common methods.