|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Common Tesseract Kinematic Limits and Related Utility Functions. More...
#include <tesseract_common/macros.h>#include <Eigen/Core>#include <Eigen/Geometry>#include <boost/serialization/base_object.hpp>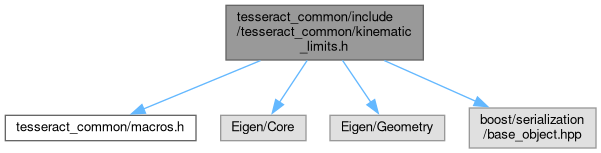

Go to the source code of this file.
Classes | |
| struct | tesseract_common::KinematicLimits |
| Store kinematic limits. More... | |
Namespaces | |
| namespace | tesseract_common |
Functions | |
| template<typename FloatType > | |
| bool | tesseract_common::isWithinPositionLimits (const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 1 > > &joint_positions, const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 2 > > &position_limits) |
| Check if within position limits. More... | |
| template<typename FloatType > | |
| bool | tesseract_common::satisfiesPositionLimits (const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 1 > > &joint_positions, const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 2 > > &position_limits, const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 1 > > &max_diff, const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 1 > > &max_rel_diff) |
| Check if joint position is within bounds or relatively equal to a limit. More... | |
| template<typename FloatType > | |
| bool | tesseract_common::satisfiesPositionLimits (const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 1 > > &joint_positions, const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 2 > > &position_limits, FloatType max_diff=static_cast< FloatType >(1e-6), FloatType max_rel_diff=std::numeric_limits< FloatType >::epsilon()) |
| Check if joint position is within bounds or relatively equal to a limit. More... | |
| template<typename FloatType > | |
| void | tesseract_common::enforcePositionLimits (Eigen::Ref< Eigen::Matrix< FloatType, Eigen::Dynamic, 1 > > joint_positions, const Eigen::Ref< const Eigen::Matrix< FloatType, Eigen::Dynamic, 2 > > &position_limits) |
| Enforce position to be within the provided limits. More... | |
Common Tesseract Kinematic Limits and Related Utility Functions.