#include <entity_manager.h>
◆ addLink()
| EntityID tesseract_visualization::EntityManager::addLink |
( |
const std::string & |
name | ) |
|
Add link name to manager and return id for link.
- Parameters
-
| name | Name given to the link |
- Returns
- The Entity ID
◆ addModel()
| EntityID tesseract_visualization::EntityManager::addModel |
( |
const std::string & |
name | ) |
|
Add model name to manager and return id for model.
- Parameters
-
| name | Name given to the model |
- Returns
- The Entity ID
◆ addSensor()
| EntityID tesseract_visualization::EntityManager::addSensor |
( |
const std::string & |
name | ) |
|
Add sensor name to manager and return id for sensor.
- Parameters
-
| name | Name given to the sensor |
- Returns
- The Entity ID
◆ addVisual()
| EntityID tesseract_visualization::EntityManager::addVisual |
( |
const std::string & |
name | ) |
|
Add visual name to manager and return id for visual.
- Parameters
-
| name | Name given to the visual |
- Returns
- The Entity ID
◆ clear()
| void tesseract_visualization::EntityManager::clear |
( |
| ) |
|
◆ empty()
| bool tesseract_visualization::EntityManager::empty |
( |
| ) |
const |
◆ getLink()
| EntityID tesseract_visualization::EntityManager::getLink |
( |
const std::string & |
name | ) |
const |
Given the link name return the ID.
- Parameters
-
- Returns
- The ID of the link (if < 1000 it was not found)
◆ getLinks()
| const EntityMap & tesseract_visualization::EntityManager::getLinks |
( |
| ) |
const |
Get all links being managed.
- Returns
- A map of names to entity id's
◆ getModel()
| EntityID tesseract_visualization::EntityManager::getModel |
( |
const std::string & |
name | ) |
const |
Given the model name return the ID.
- Parameters
-
- Returns
- The ID of the model (if < 1000 it was not found)
◆ getModels()
| const EntityMap & tesseract_visualization::EntityManager::getModels |
( |
| ) |
const |
Get all models being managed.
- Returns
- A map of names to entity id's
◆ getSensor()
| EntityID tesseract_visualization::EntityManager::getSensor |
( |
const std::string & |
name | ) |
const |
Given the sensor name return the ID.
- Parameters
-
- Returns
- The ID of the visual (if < 1000 it was not found)
◆ getSensors()
| const EntityMap & tesseract_visualization::EntityManager::getSensors |
( |
| ) |
const |
Get all sensors being managed.
- Returns
- A map of names to entity id's
◆ getVisual()
| EntityID tesseract_visualization::EntityManager::getVisual |
( |
const std::string & |
name | ) |
const |
Given the visual name return the ID.
- Parameters
-
- Returns
- The ID of the visual (if < 1000 it was not found)
◆ getVisuals()
| const EntityMap & tesseract_visualization::EntityManager::getVisuals |
( |
| ) |
const |
Get all visuals being managed.
- Returns
- A map of names to entity id's
◆ entity_counter_
| EntityID tesseract_visualization::EntityManager::entity_counter_ { 1000 } |
|
private |
Start entity counter to avoid clashing with gazebo
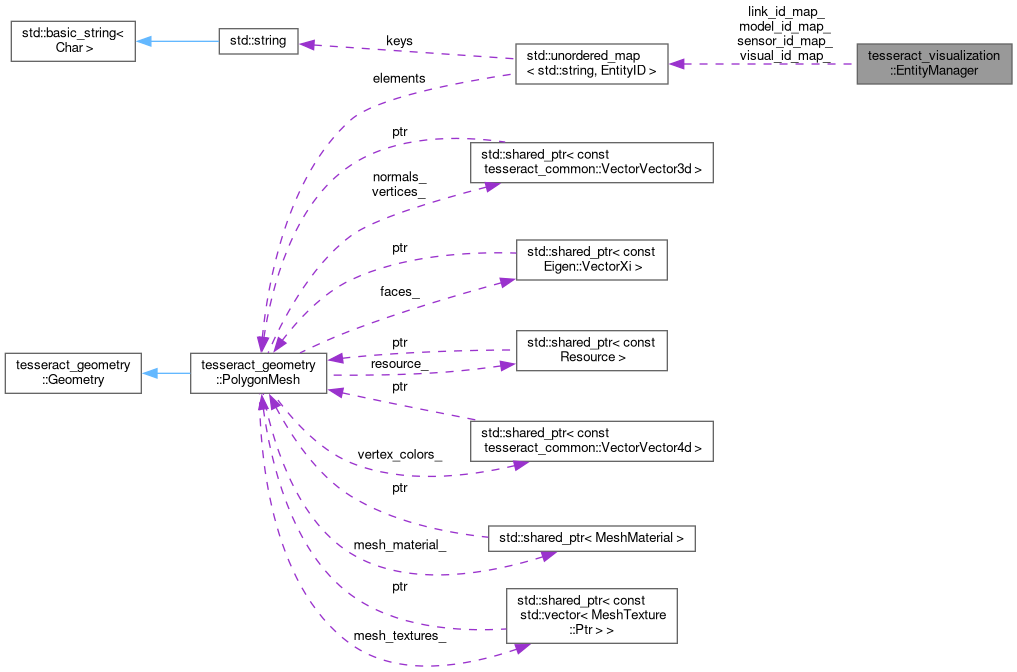
◆ link_id_map_
| EntityMap tesseract_visualization::EntityManager::link_id_map_ |
|
private |
Stores entity id for each link
◆ model_id_map_
| EntityMap tesseract_visualization::EntityManager::model_id_map_ |
|
private |
Stores entity id for each model
◆ sensor_id_map_
| EntityMap tesseract_visualization::EntityManager::sensor_id_map_ |
|
private |
Stores entity id for each sensor
◆ visual_id_map_
| EntityMap tesseract_visualization::EntityManager::visual_id_map_ |
|
private |
Stores entity id for each visual
The documentation for this class was generated from the following files: