|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
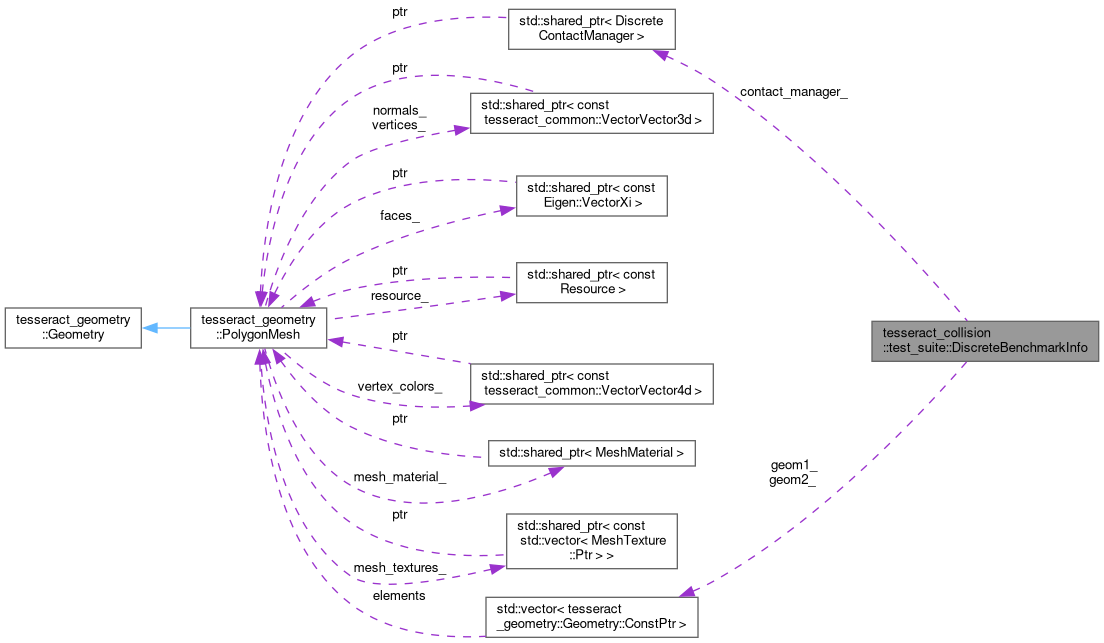
Contains the information necessary to run the benchmarks for discrete collision checking. More...
#include <primatives_benchmarks.hpp>
Public Member Functions | |
| DiscreteBenchmarkInfo (const DiscreteContactManager::ConstPtr &contact_manager, const tesseract_geometry::Geometry::ConstPtr &geom1, const Eigen::Isometry3d &pose1, const tesseract_geometry::Geometry::ConstPtr &geom2, const Eigen::Isometry3d &pose2, ContactTestType contact_test_type) | |
Contains the information necessary to run the benchmarks for discrete collision checking.
|
inline |
| DiscreteContactManager::Ptr tesseract_collision::test_suite::DiscreteBenchmarkInfo::contact_manager_ |
| ContactTestType tesseract_collision::test_suite::DiscreteBenchmarkInfo::contact_test_type_ |
| CollisionShapesConst tesseract_collision::test_suite::DiscreteBenchmarkInfo::geom1_ |
| CollisionShapesConst tesseract_collision::test_suite::DiscreteBenchmarkInfo::geom2_ |
| tesseract_common::VectorIsometry3d tesseract_collision::test_suite::DiscreteBenchmarkInfo::obj1_poses |
| tesseract_common::VectorIsometry3d tesseract_collision::test_suite::DiscreteBenchmarkInfo::obj2_poses |