|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Tesseract ROS FCL Utility Functions. More...
#include <tesseract_common/macros.h>#include <fcl/broadphase/broadphase_dynamic_AABB_tree-inl.h>#include <fcl/narrowphase/collision-inl.h>#include <fcl/narrowphase/distance-inl.h>#include <memory>#include <set>#include <console_bridge/console.h>#include <tesseract_collision/core/types.h>#include <tesseract_collision/core/common.h>#include <tesseract_collision/fcl/fcl_collision_object_wrapper.h>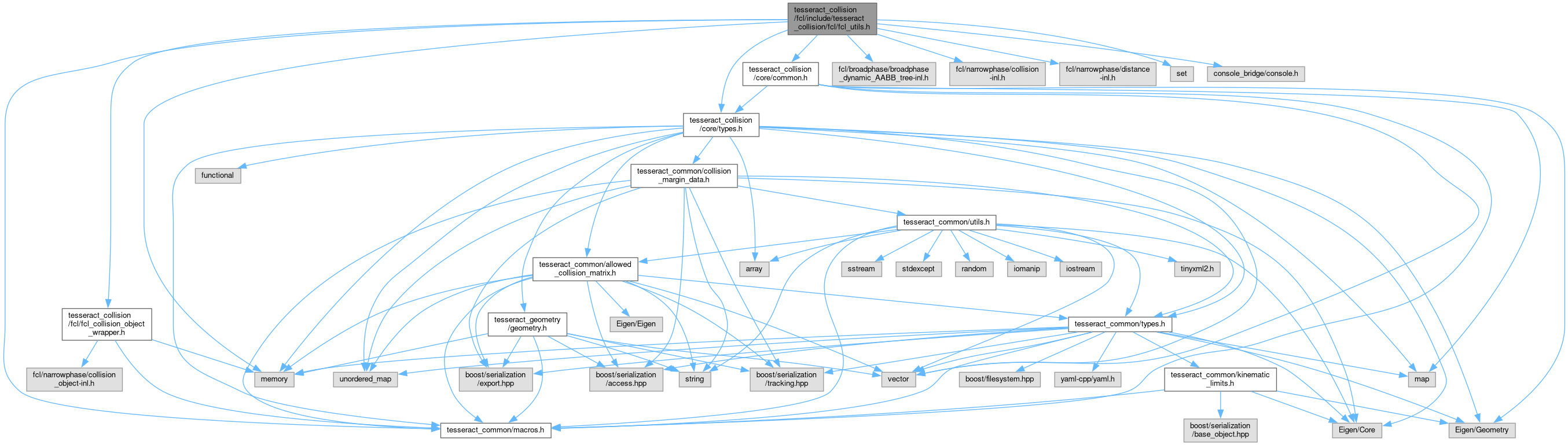

Go to the source code of this file.
Classes | |
| class | tesseract_collision::tesseract_collision_fcl::CollisionObjectWrapper |
| This is a Tesseract link collision object wrapper which add items specific to tesseract. It is a wrapper around a tesseract link which may contain several collision objects. More... | |
Namespaces | |
| namespace | tesseract_collision |
| namespace | tesseract_collision::tesseract_collision_fcl |
Typedefs | |
| using | tesseract_collision::tesseract_collision_fcl::CollisionGeometryPtr = std::shared_ptr< fcl::CollisionGeometryd > |
| using | tesseract_collision::tesseract_collision_fcl::CollisionObjectPtr = std::shared_ptr< FCLCollisionObjectWrapper > |
| using | tesseract_collision::tesseract_collision_fcl::CollisionObjectRawPtr = fcl::CollisionObjectd * |
| using | tesseract_collision::tesseract_collision_fcl::CollisionObjectConstPtr = std::shared_ptr< const fcl::CollisionObjectd > |
| using | tesseract_collision::tesseract_collision_fcl::COW = CollisionObjectWrapper |
| using | tesseract_collision::tesseract_collision_fcl::Link2COW = std::map< std::string, COW::Ptr > |
| using | tesseract_collision::tesseract_collision_fcl::Link2ConstCOW = std::map< std::string, COW::ConstPtr > |
Functions | |
| CollisionGeometryPtr | tesseract_collision::tesseract_collision_fcl::createShapePrimitive (const CollisionShapeConstPtr &geom) |
| COW::Ptr | tesseract_collision::tesseract_collision_fcl::createFCLCollisionObject (const std::string &name, const int &type_id, const CollisionShapesConst &shapes, const tesseract_common::VectorIsometry3d &shape_poses, bool enabled) |
| void | tesseract_collision::tesseract_collision_fcl::updateCollisionObjectFilters (const std::vector< std::string > &active, const COW::Ptr &cow, const std::unique_ptr< fcl::BroadPhaseCollisionManagerd > &static_manager, const std::unique_ptr< fcl::BroadPhaseCollisionManagerd > &dynamic_manager) |
| Update collision objects filters. More... | |
| bool | tesseract_collision::tesseract_collision_fcl::collisionCallback (fcl::CollisionObjectd *o1, fcl::CollisionObjectd *o2, void *data) |
| bool | tesseract_collision::tesseract_collision_fcl::distanceCallback (fcl::CollisionObjectd *o1, fcl::CollisionObjectd *o2, void *data) |
Tesseract ROS FCL Utility Functions.