|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
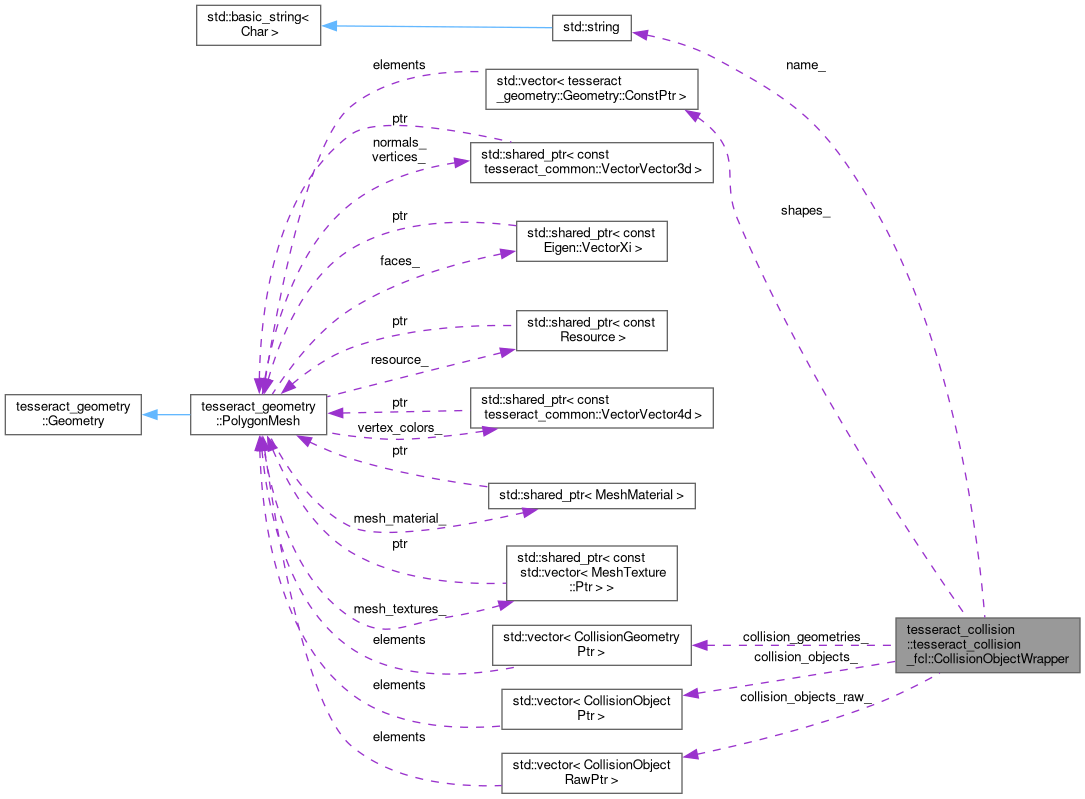
This is a Tesseract link collision object wrapper which add items specific to tesseract. It is a wrapper around a tesseract link which may contain several collision objects. More...
#include <fcl_utils.h>
Public Types | |
| using | Ptr = std::shared_ptr< CollisionObjectWrapper > |
| using | ConstPtr = std::shared_ptr< const CollisionObjectWrapper > |
Public Member Functions | |
| CollisionObjectWrapper ()=default | |
| CollisionObjectWrapper (std::string name, const int &type_id, CollisionShapesConst shapes, tesseract_common::VectorIsometry3d shape_poses) | |
| const std::string & | getName () const |
| const int & | getTypeID () const |
| bool | sameObject (const CollisionObjectWrapper &other) const |
| Check if two objects point to the same source object. More... | |
| const CollisionShapesConst & | getCollisionGeometries () const |
| const tesseract_common::VectorIsometry3d & | getCollisionGeometriesTransforms () const |
| void | setCollisionObjectsTransform (const Eigen::Isometry3d &pose) |
| void | setContactDistanceThreshold (double contact_distance) |
| double | getContactDistanceThreshold () const |
| const Eigen::Isometry3d & | getCollisionObjectsTransform () const |
| const std::vector< CollisionObjectPtr > & | getCollisionObjects () const |
| std::vector< CollisionObjectPtr > & | getCollisionObjects () |
| const std::vector< CollisionObjectRawPtr > & | getCollisionObjectsRaw () const |
| std::vector< CollisionObjectRawPtr > & | getCollisionObjectsRaw () |
| std::shared_ptr< CollisionObjectWrapper > | clone () const |
| int | getShapeIndex (const fcl::CollisionObjectd *co) const |
| Given fcl collision shape get the index to the links collision shape. More... | |
Public Attributes | |
| short int | m_collisionFilterGroup { CollisionFilterGroups::KinematicFilter } |
| short int | m_collisionFilterMask { CollisionFilterGroups::StaticFilter | CollisionFilterGroups::KinematicFilter } |
| bool | m_enabled { true } |
Protected Attributes | |
| std::string | name_ |
| int | type_id_ { -1 } |
| Eigen::Isometry3d | world_pose_ { Eigen::Isometry3d::Identity() } |
| Collision Object World Transformation. More... | |
| CollisionShapesConst | shapes_ |
| tesseract_common::VectorIsometry3d | shape_poses_ |
| std::vector< CollisionGeometryPtr > | collision_geometries_ |
| std::vector< CollisionObjectPtr > | collision_objects_ |
| std::vector< CollisionObjectRawPtr > | collision_objects_raw_ |
| The raw pointer is also stored because FCL accepts vectors for batch process. Note: They are updating the API to Shared Pointers but the broadphase has not been updated yet. More... | |
| double | contact_distance_ { 0 } |
| The contact distance threshold. More... | |
This is a Tesseract link collision object wrapper which add items specific to tesseract. It is a wrapper around a tesseract link which may contain several collision objects.
| using tesseract_collision::tesseract_collision_fcl::CollisionObjectWrapper::ConstPtr = std::shared_ptr<const CollisionObjectWrapper> |
| using tesseract_collision::tesseract_collision_fcl::CollisionObjectWrapper::Ptr = std::shared_ptr<CollisionObjectWrapper> |
|
default |
| tesseract_collision::tesseract_collision_fcl::CollisionObjectWrapper::CollisionObjectWrapper | ( | std::string | name, |
| const int & | type_id, | ||
| CollisionShapesConst | shapes, | ||
| tesseract_common::VectorIsometry3d | shape_poses | ||
| ) |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| int tesseract_collision::tesseract_collision_fcl::CollisionObjectWrapper::getShapeIndex | ( | const fcl::CollisionObjectd * | co | ) | const |
Given fcl collision shape get the index to the links collision shape.
| co | fcl collision shape |
|
inline |
|
inline |
Check if two objects point to the same source object.
|
inline |
|
inline |
|
protected |
|
protected |
|
protected |
The raw pointer is also stored because FCL accepts vectors for batch process. Note: They are updating the API to Shared Pointers but the broadphase has not been updated yet.
|
protected |
The contact distance threshold.
| short int tesseract_collision::tesseract_collision_fcl::CollisionObjectWrapper::m_collisionFilterGroup { CollisionFilterGroups::KinematicFilter } |
| short int tesseract_collision::tesseract_collision_fcl::CollisionObjectWrapper::m_collisionFilterMask { CollisionFilterGroups::StaticFilter | CollisionFilterGroups::KinematicFilter } |
| bool tesseract_collision::tesseract_collision_fcl::CollisionObjectWrapper::m_enabled { true } |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
Collision Object World Transformation.