|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <boost/serialization/access.hpp>#include <string>#include <vector>#include <memory>#include <Eigen/Eigen>#include <unordered_map>#include <tesseract_common/types.h>#include <boost/serialization/export.hpp>#include <boost/serialization/tracking.hpp>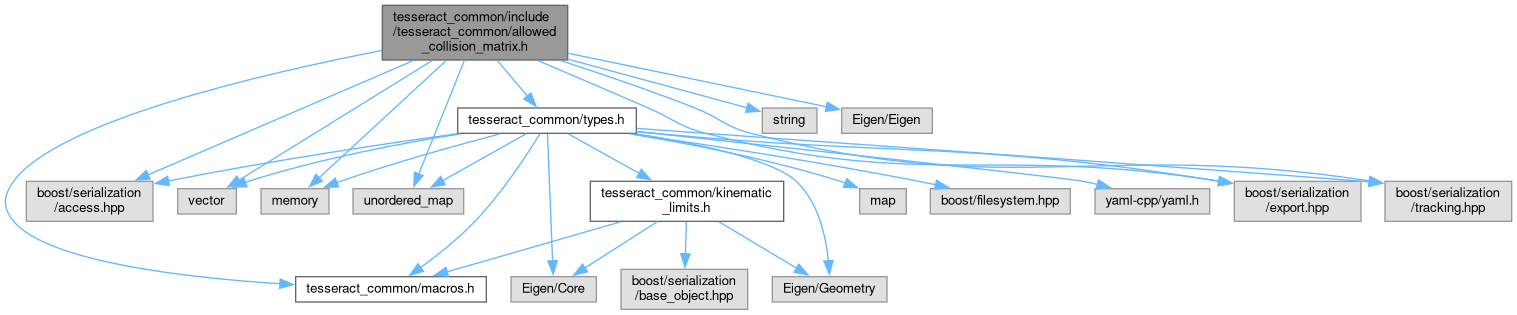

Go to the source code of this file.
Classes | |
| class | tesseract_common::AllowedCollisionMatrix |
Namespaces | |
| namespace | tesseract_common |
Typedefs | |
| using | tesseract_common::AllowedCollisionEntries = std::unordered_map< tesseract_common::LinkNamesPair, std::string, tesseract_common::PairHash > |
Functions | |
| bool | tesseract_common::operator== (const AllowedCollisionEntries &entries_1, const AllowedCollisionEntries &entries_2) |