|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
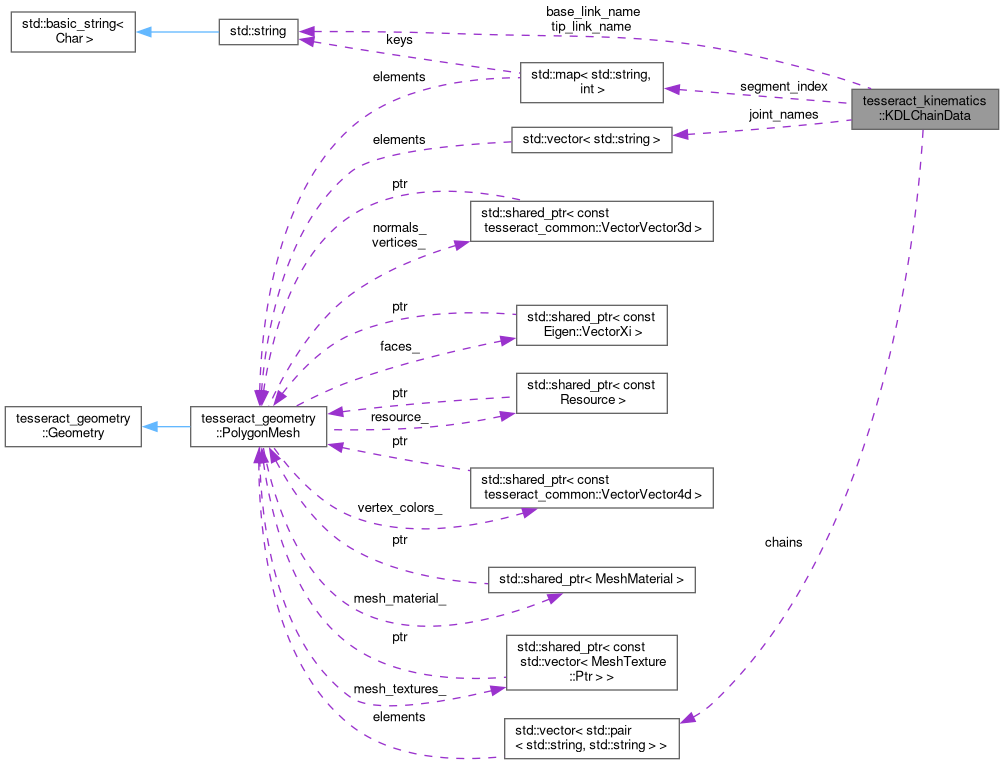
The KDLChainData struct. More...
#include <kdl_utils.h>
Public Attributes | |
| KDL::Chain | robot_chain |
| KDL Chain object. More... | |
| KDL::Tree | kdl_tree |
| KDL tree object. More... | |
| std::vector< std::string > | joint_names |
| List of joint names. More... | |
| std::string | base_link_name |
| Link name of first link in the kinematic object. More... | |
| std::string | tip_link_name |
| Link name of last kink in the kinematic object. More... | |
| std::map< std::string, int > | segment_index |
| A map from chain link name to kdl chain segment number. More... | |
| std::vector< std::pair< std::string, std::string > > | chains |
The KDLChainData struct.
This contains common data extracted when parsing a kdl chain from the scene graph
| std::string tesseract_kinematics::KDLChainData::base_link_name |
Link name of first link in the kinematic object.
| std::vector<std::pair<std::string, std::string> > tesseract_kinematics::KDLChainData::chains |
The chains used to create the object
| std::vector<std::string> tesseract_kinematics::KDLChainData::joint_names |
List of joint names.
| KDL::Tree tesseract_kinematics::KDLChainData::kdl_tree |
KDL tree object.
| KDL::Chain tesseract_kinematics::KDLChainData::robot_chain |
KDL Chain object.
| std::map<std::string, int> tesseract_kinematics::KDLChainData::segment_index |
A map from chain link name to kdl chain segment number.
| std::string tesseract_kinematics::KDLChainData::tip_link_name |
Link name of last kink in the kinematic object.