|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Tesseract Collision utils. More...
#include <tesseract_common/macros.h>#include <tesseract_collision/core/types.h>#include <tesseract_collision/core/continuous_contact_manager.h>#include <tesseract_collision/core/discrete_contact_manager.h>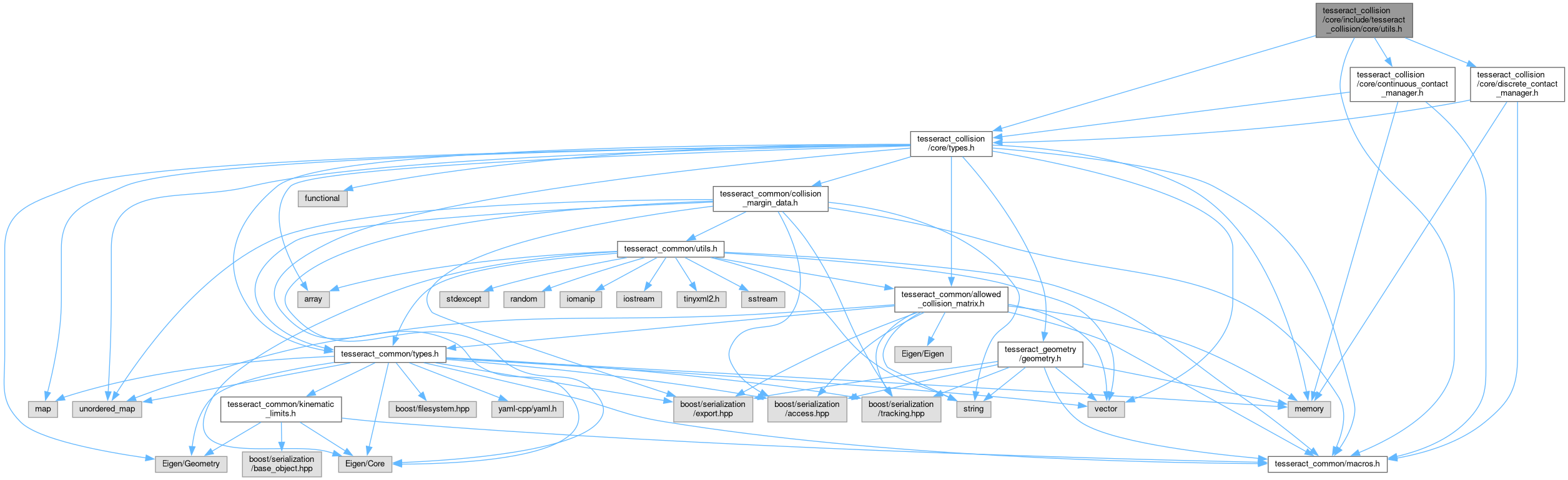

Go to the source code of this file.
Namespaces | |
| namespace | tesseract_collision |
Functions | |
| IsContactAllowedFn | tesseract_collision::combineContactAllowedFn (const IsContactAllowedFn &original, const IsContactAllowedFn &override, ACMOverrideType type=ACMOverrideType::OR) |
| Combines two IsContactAllowedFns using the override type. More... | |
| template<typename ManagerType > | |
| void | tesseract_collision::applyIsContactAllowedFnOverride (ManagerType &manager, const tesseract_common::AllowedCollisionMatrix &acm, ACMOverrideType type) |
| Applies ACM to contact manager using override type. More... | |
| template<typename ManagerType > | |
| void | tesseract_collision::applyModifyObjectEnabled (ManagerType &manager, const std::unordered_map< std::string, bool > &modify_object_enabled) |
| Loops over the map and for every object string either enables or disables it based on the value (true=enable, false=disable) More... | |
Tesseract Collision utils.