|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
Kinematics types. More...
#include <tesseract_common/macros.h>#include <string>#include <vector>#include <tesseract_common/types.h>#include <tesseract_common/utils.h>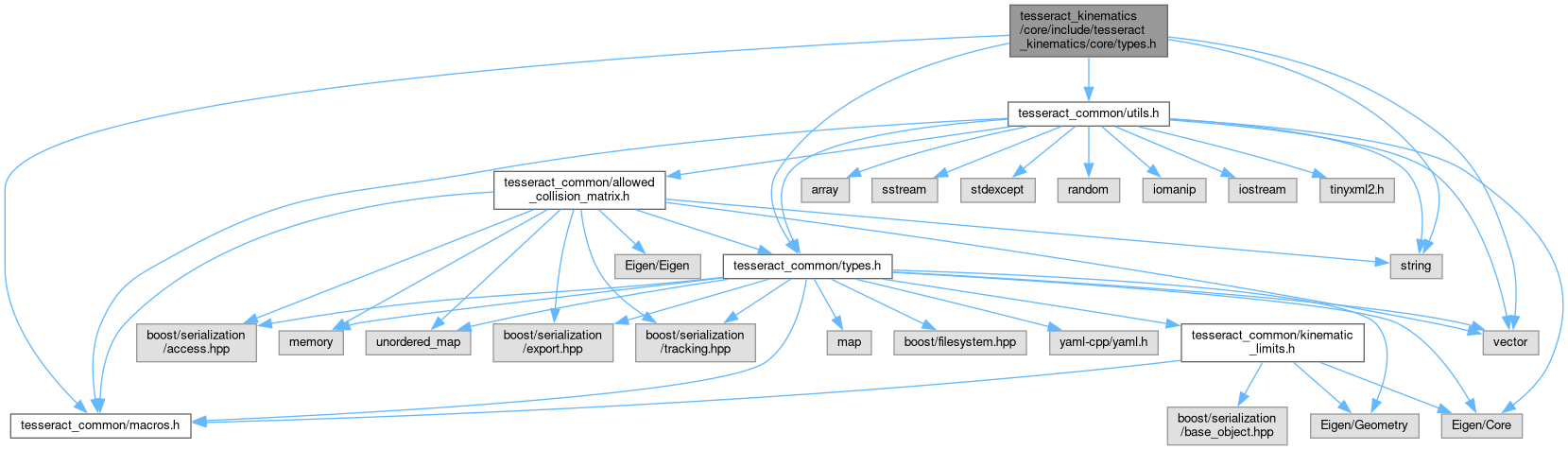

Go to the source code of this file.
Classes | |
| struct | tesseract_kinematics::URParameters |
| The Universal Robot kinematic parameters. More... | |
Namespaces | |
| namespace | tesseract_kinematics |
Typedefs | |
| using | tesseract_kinematics::IKSolutions = std::vector< Eigen::VectorXd > |
| The inverse kinematics solutions container. More... | |
Functions | |
| static const URParameters | tesseract_kinematics::UR10Parameters (0.1273, -0.612, -0.5723, 0.163941, 0.1157, 0.0922) |
| The UR10 kinematic parameters. More... | |
| static const URParameters | tesseract_kinematics::UR5Parameters (0.089159, -0.42500, -0.39225, 0.10915, 0.09465, 0.0823) |
| The UR5 kinematic parameters. More... | |
| static const URParameters | tesseract_kinematics::UR3Parameters (0.1519, -0.24365, -0.21325, 0.11235, 0.08535, 0.0819) |
| The UR3 kinematic parameters. More... | |
| static const URParameters | tesseract_kinematics::UR10eParameters (0.1807, -0.6127, -0.57155, 0.17415, 0.11985, 0.11655) |
| The UR10e kinematic parameters. More... | |
| static const URParameters | tesseract_kinematics::UR5eParameters (0.1625, -0.425, -0.3922, 0.1333, 0.0997, 0.0996) |
| The UR5e kinematic parameters. More... | |
| static const URParameters | tesseract_kinematics::UR3eParameters (0.15185, -0.24355, -0.2132, 0.13105, 0.08535, 0.0921) |
| The UR3e kinematic parameters. More... | |
Kinematics types.