|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <iiwa7_ikfast_kinematics.h>
Public Member Functions | |
| iiwa7Kinematics ()=default | |
| iiwa7Kinematics (std::string base_link_name, std::string tip_link_name, std::vector< std::string > joint_names, std::string solver_name="IKFastInvKin", std::vector< std::vector< double > > free_joint_combos={ { 0.0 } }) | |
 Public Member Functions inherited from tesseract_kinematics::IKFastInvKin Public Member Functions inherited from tesseract_kinematics::IKFastInvKin | |
| ~IKFastInvKin () override=default | |
| IKFastInvKin (const IKFastInvKin &other) | |
| IKFastInvKin & | operator= (const IKFastInvKin &other) |
| IKFastInvKin (IKFastInvKin &&)=default | |
| IKFastInvKin & | operator= (IKFastInvKin &&)=default |
| IKFastInvKin (std::string base_link_name, std::string tip_link_name, std::vector< std::string > joint_names, std::vector< Eigen::Index > redundancy_capable_joints, std::string solver_name=IKFAST_INV_KIN_CHAIN_SOLVER_NAME, std::vector< std::vector< double > > free_joint_states={}) | |
| Construct IKFast Inverse Kinematics. More... | |
| IKSolutions | calcInvKin (const tesseract_common::TransformMap &tip_link_poses, const Eigen::Ref< const Eigen::VectorXd > &seed) const override |
| Calculates joint solutions given a pose for each tip link. More... | |
| Eigen::Index | numJoints () const override |
| Number of joints in robot. More... | |
| std::vector< std::string > | getJointNames () const override |
| Get list of joint names for kinematic object. More... | |
| std::string | getBaseLinkName () const override |
| Get the robot base link name. More... | |
| std::string | getWorkingFrame () const override |
| Get the inverse kinematics working frame. More... | |
| std::vector< std::string > | getTipLinkNames () const override |
| Get the names of the tip links of the kinematics group. More... | |
| std::string | getSolverName () const override |
| Get the name of the solver. Recommend using the name of the class. More... | |
| InverseKinematics::UPtr | clone () const override |
| Clone the forward kinematics object. More... | |
| Public Member Functions inherited from tesseract_kinematics::InverseKinematics | |
| InverseKinematics ()=default | |
| virtual | ~InverseKinematics ()=default |
| InverseKinematics (const InverseKinematics &)=default | |
| InverseKinematics & | operator= (const InverseKinematics &)=default |
| InverseKinematics (InverseKinematics &&)=default | |
| InverseKinematics & | operator= (InverseKinematics &&)=default |
| virtual IKSolutions | calcInvKin (const tesseract_common::TransformMap &tip_link_poses, const Eigen::Ref< const Eigen::VectorXd > &seed) const =0 |
| Calculates joint solutions given a pose for each tip link. More... | |
| virtual std::vector< std::string > | getJointNames () const =0 |
| Get list of joint names for kinematic object. More... | |
| virtual Eigen::Index | numJoints () const =0 |
| Number of joints in robot. More... | |
| virtual std::string | getBaseLinkName () const =0 |
| Get the robot base link name. More... | |
| virtual std::string | getWorkingFrame () const =0 |
| Get the inverse kinematics working frame. More... | |
| virtual std::vector< std::string > | getTipLinkNames () const =0 |
| Get the names of the tip links of the kinematics group. More... | |
| virtual std::string | getSolverName () const =0 |
| Get the name of the solver. Recommend using the name of the class. More... | |
| virtual InverseKinematics::UPtr | clone () const =0 |
| Clone the forward kinematics object. More... | |
Additional Inherited Members | |
| Public Types inherited from tesseract_kinematics::IKFastInvKin | |
| using | Ptr = std::shared_ptr< IKFastInvKin > |
| using | ConstPtr = std::shared_ptr< const IKFastInvKin > |
| using | UPtr = std::unique_ptr< IKFastInvKin > |
| using | ConstUPtr = std::unique_ptr< const IKFastInvKin > |
| Public Types inherited from tesseract_kinematics::InverseKinematics | |
| using | Ptr = std::shared_ptr< InverseKinematics > |
| using | ConstPtr = std::shared_ptr< const InverseKinematics > |
| using | UPtr = std::unique_ptr< InverseKinematics > |
| using | ConstUPtr = std::unique_ptr< const InverseKinematics > |
| Static Public Member Functions inherited from tesseract_kinematics::IKFastInvKin | |
| static std::vector< std::vector< double > > | generateAllFreeJointStateCombinations (const std::vector< std::vector< double > > &free_joint_samples) |
| Generates all possible combinations of joint states and stores it to the free_joint_states_ class member Example: Given 2 free joints, wanting to sample the first joint at 0, 1, and 2 and the second joint at 3 and 4 the input would be [[0, 1, 2][3,4]] and it would generate [[0,3][0,4][1,3][1,4][2,3][2,4]]. More... | |
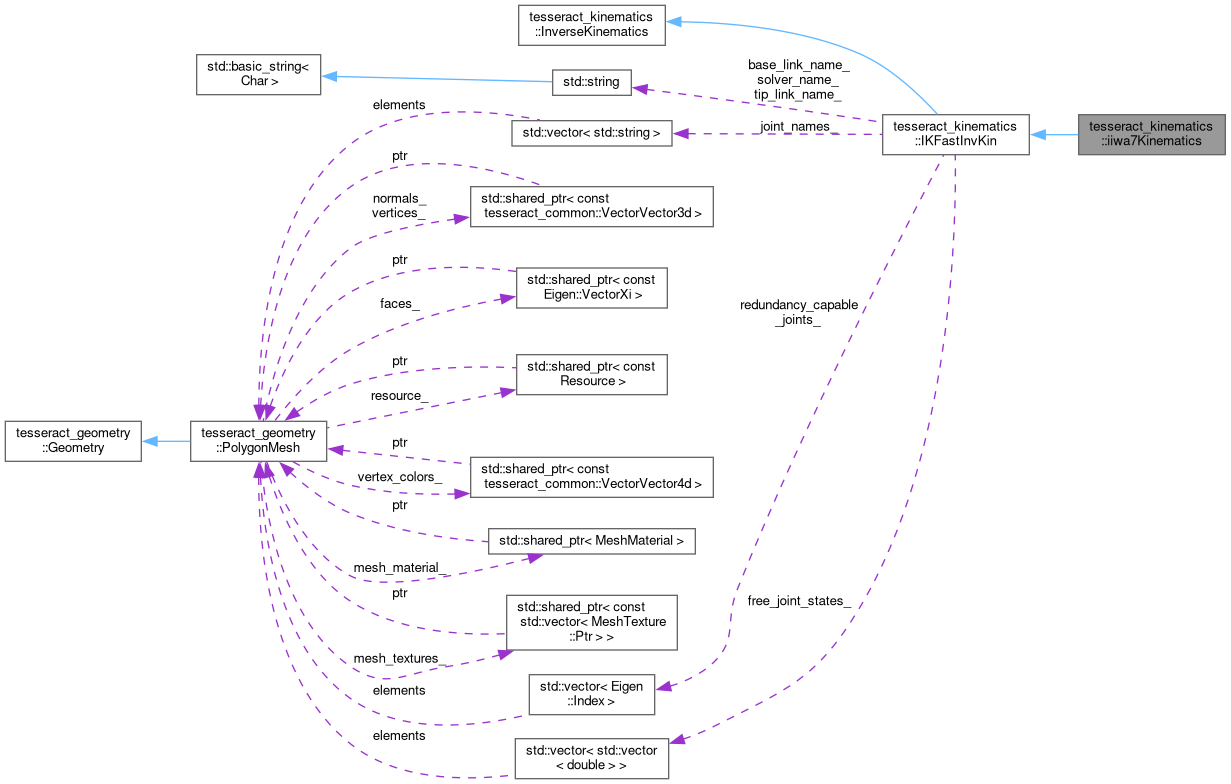
| Protected Attributes inherited from tesseract_kinematics::IKFastInvKin | |
| std::string | base_link_name_ |
| Link name of first link in the kinematic object. More... | |
| std::string | tip_link_name_ |
| Link name of last kink in the kinematic object. More... | |
| std::vector< std::string > | joint_names_ |
| Joint names for the kinematic object. More... | |
| std::vector< Eigen::Index > | redundancy_capable_joints_ |
| std::string | solver_name_ { IKFAST_INV_KIN_CHAIN_SOLVER_NAME } |
| Redundancy capable joints. More... | |
| std::vector< std::vector< double > > | free_joint_states_ |
|
default |
| tesseract_kinematics::iiwa7Kinematics::iiwa7Kinematics | ( | std::string | base_link_name, |
| std::string | tip_link_name, | ||
| std::vector< std::string > | joint_names, | ||
| std::string | solver_name = "IKFastInvKin", |
||
| std::vector< std::vector< double > > | free_joint_combos = { { 0.0 } } |
||
| ) |