|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
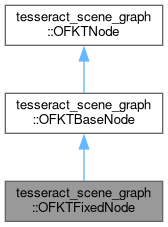
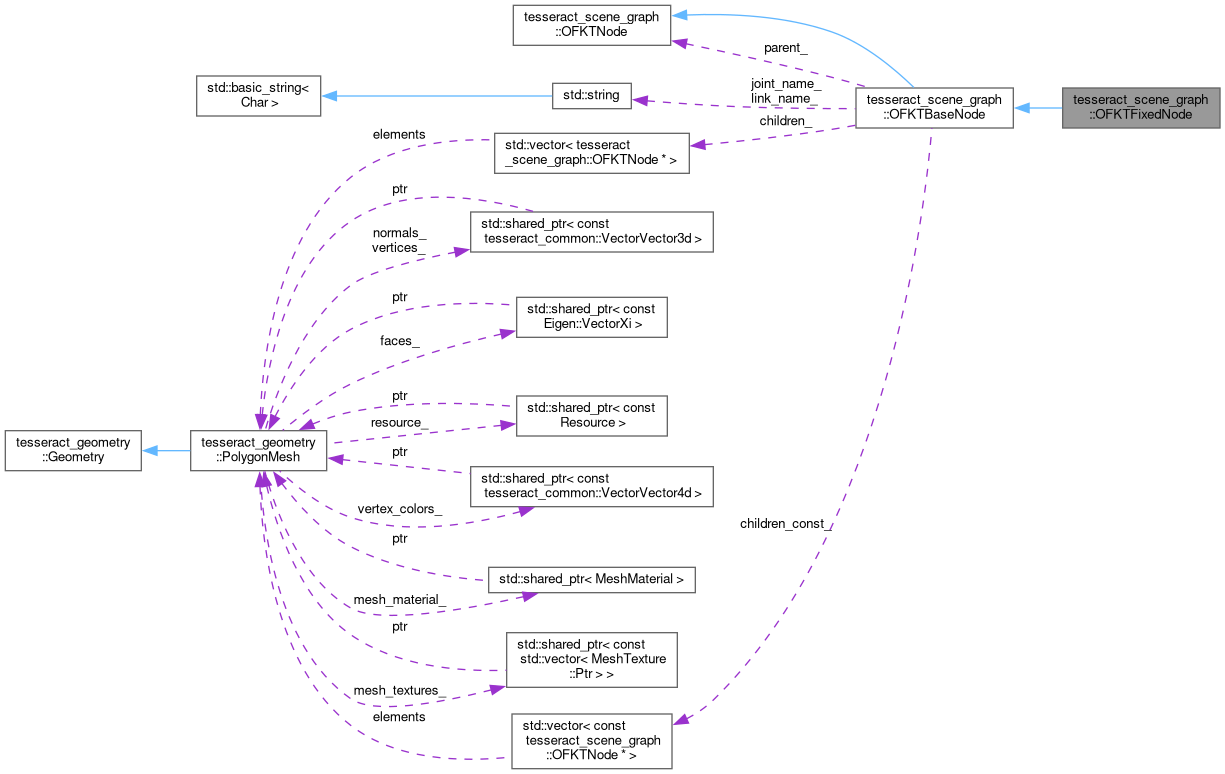
#include <ofkt_nodes.h>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | OFKTFixedNode (OFKTNode *parent, std::string link_name, std::string joint_name, const Eigen::Isometry3d &static_tf) |
| void | storeJointValue (double joint_value) override |
| Set the nodes joint value if it has one. More... | |
| double | getJointValue () const override |
| Get the current joint value. More... | |
| void | setStaticTransformation (Eigen::Isometry3d static_tf) override |
| Set the static transformation. More... | |
| void | computeAndStoreLocalTransformation () override |
| Compute and save the local transformation 'L = S * J(Joint Value)'. More... | |
| Eigen::Isometry3d | computeLocalTransformation (double joint_value) const override |
| Compute the local tranformation but do not save. More... | |
 Public Member Functions inherited from tesseract_scene_graph::OFKTBaseNode Public Member Functions inherited from tesseract_scene_graph::OFKTBaseNode | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | OFKTBaseNode (tesseract_scene_graph::JointType type, OFKTNode *parent, std::string link_name) |
| OFKTBaseNode (tesseract_scene_graph::JointType type, OFKTNode *parent, std::string link_name, std::string joint_name, const Eigen::Isometry3d &static_tf) | |
| JointType | getType () const override |
| Get the type of joint associated with the node. More... | |
| void | setParent (OFKTNode *parent) override |
| Set the parent node. More... | |
| OFKTNode * | getParent () override |
| Get the parent node. More... | |
| const OFKTNode * | getParent () const override |
| Get the parent node (const) More... | |
| const std::string & | getLinkName () const override |
| Get the link name associated with the node. More... | |
| const std::string & | getJointName () const override |
| Get the joint name associated with the node. More... | |
| void | storeJointValue (double joint_value) override |
| Set the nodes joint value if it has one. More... | |
| double | getJointValue () const override |
| Get the current joint value. More... | |
| bool | hasJointValueChanged () const override |
| Indicates that the joint value has changed and that local and world transformation need to be recomputed. More... | |
| void | setStaticTransformation (Eigen::Isometry3d static_tf) override |
| Set the static transformation. More... | |
| const Eigen::Isometry3d & | getStaticTransformation () const override |
| Get the nodes static transformation. More... | |
| const Eigen::Isometry3d & | getLocalTransformation () const override |
| Get the local transformation: 'L = S * J'. More... | |
| Eigen::Isometry3d | computeLocalTransformation (double joint_value) const override |
| Compute the local tranformation but do not save. More... | |
| void | computeAndStoreWorldTransformation () override |
| Compute and store the nodes world transformation. More... | |
| const Eigen::Isometry3d & | getWorldTransformation () const override |
| Get the nodes world transformation. More... | |
| bool | updateWorldTransformationRequired () const override |
| Indicates if an update of the world transformation is required. More... | |
| Eigen::Matrix< double, 6, 1 > | getLocalTwist () const override |
| Return the twist of the node in its local frame. More... | |
| void | addChild (OFKTNode *node) override |
| Add a child node. More... | |
| void | removeChild (const OFKTNode *node) override |
| Remove a child node assiciated with this node. More... | |
| std::vector< OFKTNode * > & | getChildren () override |
| Get a vector of child nodes associated with this node. More... | |
| const std::vector< const OFKTNode * > & | getChildren () const override |
| Get a vector of child nodes associated with this node (Const) More... | |
| Public Member Functions inherited from tesseract_scene_graph::OFKTNode | |
| OFKTNode ()=default | |
| virtual | ~OFKTNode ()=default |
| OFKTNode (const OFKTNode &)=delete | |
| OFKTNode & | operator= (const OFKTNode &)=delete |
| OFKTNode (OFKTNode &&)=delete | |
| OFKTNode & | operator= (OFKTNode &&)=delete |
| virtual JointType | getType () const =0 |
| Get the type of joint associated with the node. More... | |
| virtual void | setParent (OFKTNode *parent)=0 |
| Set the parent node. More... | |
| virtual OFKTNode * | getParent ()=0 |
| Get the parent node. More... | |
| virtual const OFKTNode * | getParent () const =0 |
| Get the parent node (const) More... | |
| virtual const std::string & | getLinkName () const =0 |
| Get the link name associated with the node. More... | |
| virtual const std::string & | getJointName () const =0 |
| Get the joint name associated with the node. More... | |
| virtual void | storeJointValue (double joint_value)=0 |
| Set the nodes joint value if it has one. More... | |
| virtual double | getJointValue () const =0 |
| Get the current joint value. More... | |
| virtual bool | hasJointValueChanged () const =0 |
| Indicates that the joint value has changed and that local and world transformation need to be recomputed. More... | |
| virtual void | setStaticTransformation (Eigen::Isometry3d static_tf)=0 |
| Set the static transformation. More... | |
| virtual const Eigen::Isometry3d & | getStaticTransformation () const =0 |
| Get the nodes static transformation. More... | |
| virtual void | computeAndStoreLocalTransformation ()=0 |
| Compute and save the local transformation 'L = S * J(Joint Value)'. More... | |
| virtual const Eigen::Isometry3d & | getLocalTransformation () const =0 |
| Get the local transformation: 'L = S * J'. More... | |
| virtual Eigen::Isometry3d | computeLocalTransformation (double joint_value) const =0 |
| Compute the local tranformation but do not save. More... | |
| virtual void | computeAndStoreWorldTransformation ()=0 |
| Compute and store the nodes world transformation. More... | |
| virtual const Eigen::Isometry3d & | getWorldTransformation () const =0 |
| Get the nodes world transformation. More... | |
| virtual bool | updateWorldTransformationRequired () const =0 |
| Indicates if an update of the world transformation is required. More... | |
| virtual Eigen::Matrix< double, 6, 1 > | getLocalTwist () const =0 |
| Return the twist of the node in its local frame. More... | |
| virtual void | addChild (OFKTNode *node)=0 |
| Add a child node. More... | |
| virtual void | removeChild (const OFKTNode *node)=0 |
| Remove a child node assiciated with this node. More... | |
| virtual std::vector< OFKTNode * > & | getChildren ()=0 |
| Get a vector of child nodes associated with this node. More... | |
| virtual const std::vector< const OFKTNode * > & | getChildren () const =0 |
| Get a vector of child nodes associated with this node (Const) More... | |
Friends | |
| class | OFKTStateSolver |
Additional Inherited Members | |
| Public Types inherited from tesseract_scene_graph::OFKTNode | |
| using | UPtr = std::unique_ptr< OFKTNode > |
| using | Ptr = std::shared_ptr< OFKTNode > |
| using | ConstPtr = std::shared_ptr< const OFKTNode > |
| Protected Attributes inherited from tesseract_scene_graph::OFKTBaseNode | |
| tesseract_scene_graph::JointType | type_ |
| OFKTNode * | parent_ { nullptr } |
| std::string | link_name_ |
| std::string | joint_name_ |
| Eigen::Isometry3d | static_tf_ { Eigen::Isometry3d::Identity() } |
| Eigen::Isometry3d | joint_tf_ { Eigen::Isometry3d::Identity() } |
| Eigen::Isometry3d | local_tf_ { Eigen::Isometry3d::Identity() } |
| Eigen::Isometry3d | world_tf_ { Eigen::Isometry3d::Identity() } |
| Eigen::Matrix< double, 6, 1 > | local_twist_ { Eigen::VectorXd::Zero(6) } |
| double | joint_value_ { 0 } |
| bool | joint_value_changed_ { false } |
| std::vector< OFKTNode * > | children_ |
| std::vector< const OFKTNode * > | children_const_ |
| bool | update_world_required_ { true } |
| tesseract_scene_graph::OFKTFixedNode::OFKTFixedNode | ( | OFKTNode * | parent, |
| std::string | link_name, | ||
| std::string | joint_name, | ||
| const Eigen::Isometry3d & | static_tf | ||
| ) |
|
overridevirtual |
Compute and save the local transformation 'L = S * J(Joint Value)'.
This should reset the flag such that hasJointValueChanged() returns false
Implements tesseract_scene_graph::OFKTNode.
|
overridevirtual |
Compute the local tranformation but do not save.
This provides a const method for computing the local transform.
| joint_value | The joint value for calculating the local transformation |
Reimplemented from tesseract_scene_graph::OFKTBaseNode.
|
overridevirtual |
Get the current joint value.
Reimplemented from tesseract_scene_graph::OFKTBaseNode.
|
overridevirtual |
Set the static transformation.
This should recompute the local transformation and updateWorldTransformationRequired() = true.
| static_tf | The new static transformation |
Reimplemented from tesseract_scene_graph::OFKTBaseNode.
|
overridevirtual |
Set the nodes joint value if it has one.
This should indicate hasJointValueChanged() = true
| joint_value | The joint value |
Reimplemented from tesseract_scene_graph::OFKTBaseNode.
|
friend |