|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
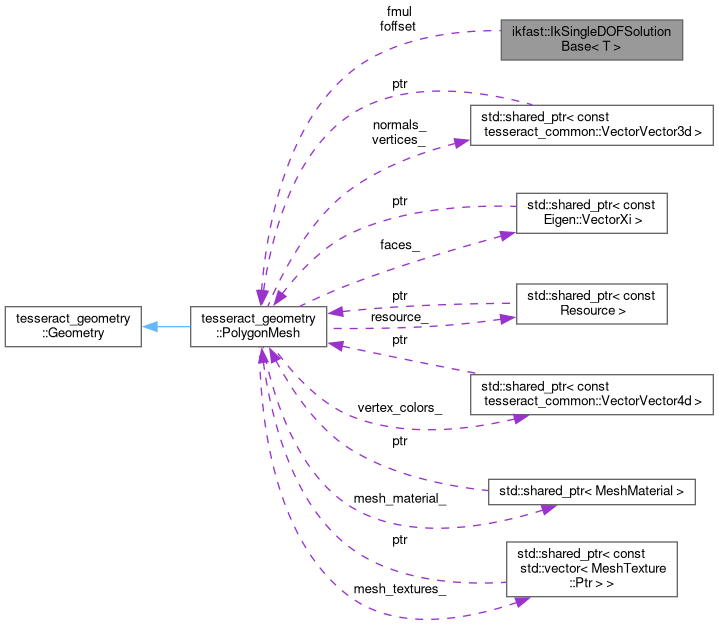
holds the solution for a single dof More...
#include <ikfast.h>
Public Member Functions | |
| IkSingleDOFSolutionBase () | |
Public Attributes | |
| T | fmul { 0 } |
| joint value is fmul*sol[freeind]+foffset More... | |
| T | foffset { 0 } |
| joint value is fmul*sol[freeind]+foffset More... | |
| signed char | freeind { -1 } |
| if >= 0, mimics another joint More... | |
| unsigned char | jointtype { 1 } |
| joint type, 0x01 is revolute, 0x11 is slider More... | |
| unsigned char | maxsolutions { 1 } |
| max possible indices, 0 if controlled by free index or a free joint itself More... | |
| unsigned char | indices [5] |
holds the solution for a single dof
|
inline |
| T ikfast::IkSingleDOFSolutionBase< T >::fmul { 0 } |
joint value is fmul*sol[freeind]+foffset
| T ikfast::IkSingleDOFSolutionBase< T >::foffset { 0 } |
joint value is fmul*sol[freeind]+foffset
| signed char ikfast::IkSingleDOFSolutionBase< T >::freeind { -1 } |
if >= 0, mimics another joint
| unsigned char ikfast::IkSingleDOFSolutionBase< T >::indices[5] |
| unsigned char ikfast::IkSingleDOFSolutionBase< T >::jointtype { 1 } |
joint type, 0x01 is revolute, 0x11 is slider
| unsigned char ikfast::IkSingleDOFSolutionBase< T >::maxsolutions { 1 } |
max possible indices, 0 if controlled by free index or a free joint itself