|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
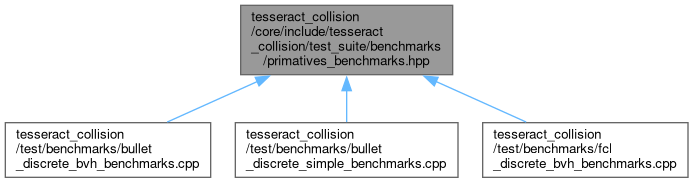
#include <tesseract_collision/core/discrete_contact_manager.h>#include <tesseract_geometry/geometries.h>#include <Eigen/Eigen>
Go to the source code of this file.
Classes | |
| struct | tesseract_collision::test_suite::DiscreteBenchmarkInfo |
| Contains the information necessary to run the benchmarks for discrete collision checking. More... | |
Namespaces | |
| namespace | tesseract_collision |
| namespace | tesseract_collision::test_suite |
Functions | |
| static void | tesseract_collision::test_suite::BM_CLONE (benchmark::State &state, DiscreteBenchmarkInfo info, std::size_t num_obj) |
| Benchmark that checks the clone method in discrete contact managers. More... | |
| static void | tesseract_collision::test_suite::BM_CONTACT_TEST (benchmark::State &state, DiscreteBenchmarkInfo info) |
| Benchmark that checks the contactTest function in discrete contact managers. More... | |
| static void | tesseract_collision::test_suite::BM_SELECT_RANDOM_OBJECT (benchmark::State &state, int num_obj) |
| Benchmark that checks how long it takes to select a random object so that number can be subtracted from other benchmarks if that is important. More... | |
| static void | tesseract_collision::test_suite::BM_SET_COLLISION_OBJECTS_TRANSFORM_SINGLE (benchmark::State &state, DiscreteBenchmarkInfo info, std::size_t num_obj) |
| Benchmark that checks the setCollisionObjectsTransform(const std::string& name, const Eigen::Isometry3d&
pose) method in discrete contact managers. More... | |
| static void | tesseract_collision::test_suite::BM_SET_COLLISION_OBJECTS_TRANSFORM_VECTOR (benchmark::State &state, DiscreteBenchmarkInfo info, std::size_t num_obj) |
| Benchmark that checks the setCollisionObjectsTransform(const std::vector<std::string>& names, const
tesseract_common::VectorIsometry3d& poses) method in discrete contact managers. Moves only a single random link. More... | |
| static void | tesseract_collision::test_suite::BM_SET_COLLISION_OBJECTS_TRANSFORM_MAP (benchmark::State &state, DiscreteBenchmarkInfo info, std::size_t num_obj) |
| Benchmark that checks the setCollisionObjectsTransform(const tesseract_common::TransformMap& transforms) method in discrete contact managers. Moves only a single random link. More... | |