|
Tesseract
Motion Planning Environment
|
Loading...
Searching...
No Matches
|
Tesseract
Motion Planning Environment
|
#include <tesseract_common/macros.h>#include <tesseract_collision/vhacd/inc/vhacdVolume.h>#include <bullet/LinearMath/btConvexHullComputer.h>#include <algorithm>#include <float.h>#include <math.h>#include <queue>#include <string.h>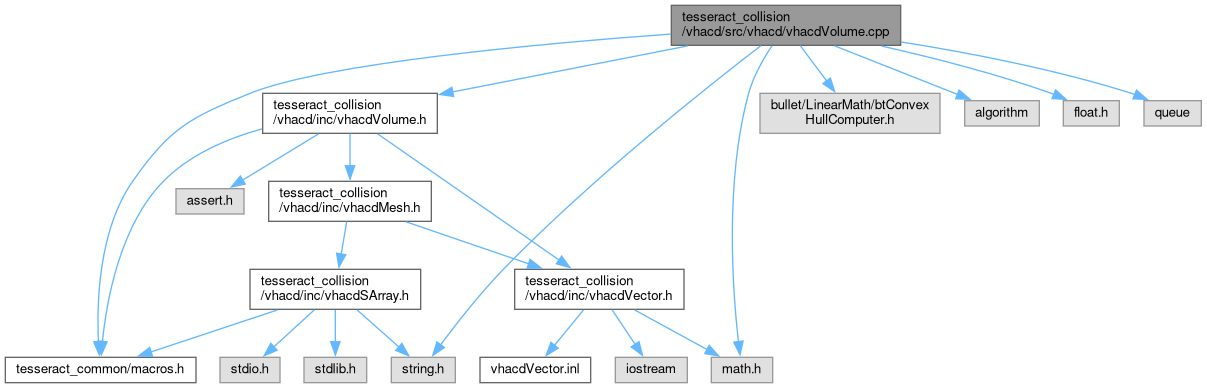
Namespaces | |
| namespace | tesseract_collision |
| namespace | tesseract_collision::VHACD |
Macros | |
| #define | X 0 |
| #define | Y 1 |
| #define | Z 2 |
| #define | FINDMINMAX(x0, x1, x2, min, max) |
| #define | AXISTEST_X01(a, b, fa, fb) |
| #define | AXISTEST_X2(a, b, fa, fb) |
| #define | AXISTEST_Y02(a, b, fa, fb) |
| #define | AXISTEST_Y1(a, b, fa, fb) |
| #define | AXISTEST_Z12(a, b, fa, fb) |
| #define | AXISTEST_Z0(a, b, fa, fb) |
Functions | |
| int32_t | tesseract_collision::VHACD::PlaneBoxOverlap (const Vec3< double > &normal, const Vec3< double > &vert, const Vec3< double > &maxbox) |
| int32_t | tesseract_collision::VHACD::TriBoxOverlap (const Vec3< double > &boxcenter, const Vec3< double > &boxhalfsize, const Vec3< double > &triver0, const Vec3< double > &triver1, const Vec3< double > &triver2) |
| void | tesseract_collision::VHACD::Diagonalize (const double(&A)[3][3], double(&Q)[3][3], double(&D)[3][3]) |
| #define AXISTEST_X01 | ( | a, | |
| b, | |||
| fa, | |||
| fb | |||
| ) |
| #define AXISTEST_X2 | ( | a, | |
| b, | |||
| fa, | |||
| fb | |||
| ) |
| #define AXISTEST_Y02 | ( | a, | |
| b, | |||
| fa, | |||
| fb | |||
| ) |
| #define AXISTEST_Y1 | ( | a, | |
| b, | |||
| fa, | |||
| fb | |||
| ) |
| #define AXISTEST_Z0 | ( | a, | |
| b, | |||
| fa, | |||
| fb | |||
| ) |
| #define AXISTEST_Z12 | ( | a, | |
| b, | |||
| fa, | |||
| fb | |||
| ) |
| #define FINDMINMAX | ( | x0, | |
| x1, | |||
| x2, | |||
| min, | |||
| max | |||
| ) |
| #define X 0 |
| #define Y 1 |
| #define Z 2 |